
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология и педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Рефераты по сексологии
Рефераты по информатике программированию
Краткое содержание произведений
Реферат: Шагающие роботы
Реферат: Шагающие роботы
Реферат по дисциплине «Мобильные роботы»
Выполнил студент Бобров С.В.
Московская Государственная Академия Приборостроения и Информатики
Кафедра Информационные Системы
Москва 2005
Введение
Создание промышленных роботов-манипуляторов, способных заменить человека на многих участках современного производства, а также автоматических систем, которые могут быть использованы в условиях, опасных для человека, является актуальной научной и технической проблемой. Одним из важных классов роботов являются шагающие роботы, предназначенные для перемещения по труднопроходимой местности.
Хотя колесные транспортные средства в настоящее время явно преобладают, известно, что при ходьбе по неподготовленной поверхности существенные преимущества имеют шагающие системы передвижения. Шагающий аппарат при движении использует для опоры лишь некоторые точки на поверхности в отличие от колесных и гусеничных машин, имеющих непрерывную колею. Кроме того, шагающий аппарат существенно меньше повреждает почвенный покров, что может оказаться важным для некоторых районов.
Однако указанные преимущества шагающего аппарата определяют его высокую сложность. Большое число управляемых степеней свободы аппарата требует сложной компоновки, разработки высокоэффективных приводов, специальной организации стоп, рассеивающих энергию удара, и т.д. Система управления должна обеспечить переработку информации о местности, принятие решений о характере движения, контроль за их реализацией. Именно создание системы управления аппаратом – центральная проблема шагающего робота, так как опыт создания даже самых сложных систем автоматического управления невозможно непосредственно использовать для построения системы управления шагающим роботом.
Композиционная концепция и биологический подход в построении роботов
Анализируя существующие виды движителей, можно заметить, что нет ничего более совершенного, чем природные системы. Их адаптивная способность потрясает. Если касаться только шагающих систем, то видно, что их мобильность значительно выше, чем у созданных человеком транспортных средств.
Человек, совершенствуя природу на базе создания комбинированных шагающих механизмов с другими типами движителей, способен создать более производительные и высоко адаптивные транспортно-технологические машины.
Природа не создала колеса просто потому, что система рычагов более приспособлена для передвижения по естественному грунту. Этому способствуют свойства опорно-двигательного аппарата шагающего движителя: дискретность колеи и наличие нерабочего пространства ног. Под дискретностью колеи понимают прерывистость контакта движителя, в данном случае с поверхностью передвижения. Под рабочим пространством ног понимается пространство, окружающее корпус, точки которого достижимы для опорного элемента шагающего движителя. Эти свойства шагающего движителя позволяют предполагать высокую опорную и профильную проходимость для искусственных шагающих средств передвижения. Кроме сильно пересеченной местности, для обычного транспорта непроходимой является и среда, приспособленная для обитания человека: здания с узкими проходами, резкими поворотами, лестничными маршами.
Слепое копирование природных объектов без глубокого изучения их поведения, как правило, не позволяло создать работоспособные конструкции, которые можно было бы использовать в практике: например, лесная машина фирма “Табержек”, робот лаборатории транспортных систем АН СССР. Эти машины не оправдали надежды конструкторов и не показали динамических качеств, характерных для насекомых.
В этом ключе интересно рассмотреть композиционную концепцию построения шагающих роботов, т.к. эта концепция сходна с физиологическими моделями управления движением в живых организмах. Сходство это основано на исследованиях российских ученых, проводимых в Институте проблем передачи информации. Поэтому, можно полагать, что композиционная концепция является биологическим подходом в робототехнике.
В соответствии с этой концепцией низший уровень управления локомоционным процессом может быть представлен как результат коллективной работы независимых замкнутых систем автоматического регулирования (регуляторов). Какие-либо связи между отдельными регуляторами (горизонтальные связи) отсутствуют. Иными словами, шагающий робот как единый автомат может быть представлен композицией некоторого количества элементарных независимо функционирующих автоматов, а локомоционный процесс результатом совместного действия этих автоматов. Каждый автомат решает свою собственную задачу и таким путем вносит свой вклад в формирование локомоционного процесса.
Каждый элементарный автомат представляет собой замкнутую систему автоматического регулирования и управляет только одним суставом. В то же время отдельный сустав в различных фазах цикла движения ноги может управляться несколькими различными регуляторами. Одноименные суставы всех ног управляют одним из параметров походки, например, таким как длина шага, высота тела робота относительно опорной поверхности или же скорость передвижения робота. Управление всеми суставами робота осуществляется параллельно, что обеспечивает высокий уровень распределенности системы управления.
Влияние на отдельный автомат действий остальных автоматов представляется как возмущающее воздействие внешней среды. Цель автомата как регулятора состоит в компенсации этих возмущений. Выходной сигнал сенсорной системы, который используется в цепи обратной связи регулятора, содержит в себе также и информацию о действиях других автоматов, так что отдельный автомат воспринимает действия других автоматов посредством сенсорной системы, а не путем каких-либо каналов связи между регуляторами. В этом случае внешняя среда отдельного автомата состоит из остальных автоматов и внешней среды робота в целом.
Желаемые параметры походки робота задаются более высоким уровнем системы управления и остаются постоянными в процессе ритмичной ходьбы. Такой подход к проблеме шагающих роботов существенно упрощает управление локомоционным процессом и делает его более наглядным.
Реализация предлагаемого подхода для построения шагающих роботов может быть достигнута путем решения проблемы сенсорных систем для автоматов. Эта проблема была решена путем применения наборов датчиков, объединенных в сенсорную систему, способную измерять каждый параметр походки.
Исследование кинематики биологических механизмов
Человечество всегда в проектировании стремилось к созданию себе-подобного механизма – прямоходящего, но бипедализм людей значительно сложнее в локомоционном плане, чем шести- или четвероногость и требует развития более сильного вестибулярного аппарата и очень серьезных систему управления на его основе, поэтому наибольшее распространение получили «многоногие» роботы. Поскольку биологический подход к разработкам наиболее сложный (требуется всестороннее изучения биологических механизмов), но в то же время и наиболее простой (не нужно изобретать велосипед – все уже давно придумано природой) было проведено изучение передвижения насекомых.
В качестве объекта исследований выбран рыжий таракан (пруссак). Тараканы (Blattodea) — один из наиболее древних отрядов крылатых насекомых. Они появились в первой половине каменноугольного периода (около 300 млн лет назад), когда на Земле царил тёплый и влажный климат. В то время тараканы были самой многочисленной и разнообразной группой насекомых. Но “процветают” они и сейчас. Так что эти насекомые вдвое старше знаменитых динозавров и в отличие от них совсем не собираются вымирать. Его ноги – тот универсальный биологический объект изучения для создания шагающей машины.
Используя кинокамеру, можно проследить бег таракана, предварительно его засняв. Для этого таракана помещают в стеклянную пробирку и, закрепив ее, снимают бегающего таракана кинокамерой. После этого с кинокамеры все переписывается на компьютер, где с помощью компьютерной программы PINNACLE замедляется бег таракана и создается фильм “Тараканий бег”. Теперь можно проследить всю кинематику его бега. Работая в программе PINNACLE, создаются отдельные кадры бега таракана, с помощью которых прослеживается кинематика движения его ног при беге.
Исходя из полученных снимков, рассмотрим способ формирования походки рыжего таракана. Основным типом его походки является походка 3—3 (трешками).
В каждый момент своего движения таракан стоит на трех ногах: передней и задней левой и средней правой (или наоборот). Каждая пара ног выполняет различную функциональную нагрузку, и это отражается на их длине. Передняя пара ног наиболее короткая, цепляясь попеременно за неровности грунта, тянет тело вперед. Средняя и самая длинная — задняя пара конечностей при разгибании в коленном суставе толкают тело таракана вперед. Он идет так, что всегда опирается на три ноги, образующие опорный треугольник, внутри которого располагается центр тяжести его тела.
Если проследить движение задних ног таракана, то можно выявить интересную закономерность в движении бедра правой и левой ноги. На экране монитора четко видно, что при движении бедро правой и левой ноги таракана все время образует одну линию. Эту закономерность можно также использовать при проектировании движения шагающего робота.
Однако таракан не всегда использует походку трешками, в какие-то моменты он переходит на галоп, правда, на очень короткий момент.
Чаще всего он использует сильное отталкивание двумя задними ногами в первый момент движения для развития скорости, а затем переходит на обычную походку трешками. Использование этого шага для передвижения робота не вполне удобно, так как очень усложнится его управление, а если масса робота велика, то усилия для движения задних ног потребуются очень большие, что не вполне можно выполнить.
Для шагающего робота в процессе выноса ног должен осуществляться контроль высоты положения стоп над поверхностью. Если высота любой из стоп становится меньше допустимой, то производится подъем ноги до достижения нужной высоты, а затем продолжается вынос ног вперед. Конец движения определяется одним из следующих условий:
Во время вспомогательной фазы должно происходить восстановление горизонтального положения и заданной высоты платформы, а также смещение центра тяжести в зону равновесия;
Зона достаточной устойчивости может быть определена через разность усилий в максимально и минимально нагруженных опорах, которая не должна превышать допустимой величины. Введение центра тяжести шагающего устройства в зону допустимой устойчивости достигается путем задания горизонтального движения платформы, что задается блоком поддержания равновесия.
Исследование бега таракана позволило сделать следующие выводы. Непрерывная походка типа 3—3 образуется в результате слияния фаз прерывистой походки. Непрерывная походка экономичнее прерывистой и обеспечивает большую скорость перемещения при тех же динамических нагрузках, однако, она может использоваться только для перемещения по сравнительно ровной поверхности.
Для общей ориентации шагающей машины в пространстве необходимо применять комплекс управляющих алгоритмов, представляющих многоуровневую иерархическую систему.
Следует отметить, что кинематика шагающего робота позволяет существенно уменьшить возможность потери проходимости, будет более маневренной, сможет проходить по сильно пересеченной местности. Опорные элементы шагающего робота имеют значительно большую зону возможных контактов с поверхностью передвижения по сравнению с колесом или гусеницей.
Пример шагающего аппарата
В качестве достойного примера шагающей машины можно рассмотреть разработку Донецкого Национального Технического Университета – шагающий аппарат «Катарина».
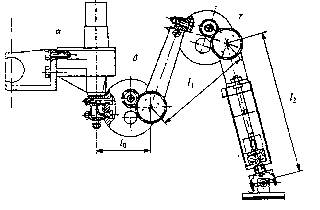
Шагающий аппарат содержит корпус, снабженный шестью ногами. В центре корпуса расположен гироскопический датчик, сообщающий системе управления информацию об ориентации корпуса по отношению к вектору силы тяжести; в передней части укреплен оптический дальномер, доставляющий информацию о поверхности, по которой перемещается шагающий робот. Шестиугольный корпус служит как носитель (основа) для шести конечностей, а также для рабочей платформы. Внутри корпуса размещается микропроцессорная система управления и силовая часть.
Каждая конечность имеет три степени свободы, и приводится в действие с помощью двигателя с механизмом (передача, коробка передач, редуктор). В нижней части конечности находятся три датчика усилия для измерения реакции силы ноги.
Основные характеристики шагающего аппарата “Катарина”:
· высота корпуса – 10 см; · длина стороны – 17 см;
· общая масса – 21 кг; · размер конечности – 40,5 см;
· масса конечности – 2.8 кг; · масса корпуса с микропроцессором – 3,8 кг;
· скорость – около 0,4 км/ч; · полезная нагрузка – 5 кг;
· длина бедра – 13,4 см; · длина голени – 20,2 см;
· поверхность касания конечности – 28,3 см2.
![]()
![]() Система управления шагающим аппаратом формирует и
исполняет управляющие сигналы, обеспечивающие движение аппарата с
автоматической адаптацией: к малым неровностям поверхности по командам
оператора (или верхнего уровня), задающего основные характеристики ходьбы и
движение корпуса аппарата. На входы системы поступают сигналы от следующих
датчиков, установленных на макете: шести датчиков контакта стопы с поверхностью;
датчиков усилий, развиваемых ногами; гировертикали; оптического дальномера. Ее
выходы (выходы блока преобразователей координат) являются входами блока
усилителей следящих систем (БУСС), состоящего из 18 отдельных усилителей, на
входы которых поступают сигналы с 18 позиционных датчиков углов поворота
звеньев ног.
Система управления шагающим аппаратом формирует и
исполняет управляющие сигналы, обеспечивающие движение аппарата с
автоматической адаптацией: к малым неровностям поверхности по командам
оператора (или верхнего уровня), задающего основные характеристики ходьбы и
движение корпуса аппарата. На входы системы поступают сигналы от следующих
датчиков, установленных на макете: шести датчиков контакта стопы с поверхностью;
датчиков усилий, развиваемых ногами; гировертикали; оптического дальномера. Ее
выходы (выходы блока преобразователей координат) являются входами блока
усилителей следящих систем (БУСС), состоящего из 18 отдельных усилителей, на
входы которых поступают сигналы с 18 позиционных датчиков углов поворота
звеньев ног.
Система управления состоит из следующих крупных блоков: блока управляемых генераторов шаговых циклов, который содержит шесть идентичных генераторов, формирующих в плоскости некоторых вспомогательных декартовых координат замкнутые пространственно-временные кривые шагового цикла каждой ноги; блока линейного преобразования координат, который обеспечивает геометрическую привязку шаговых циклов к корпусу и конечностям аппарата и их масштабирование; блока маневрирования, который по командам от верхнего уровня деформирует шаговые циклы ног так, чтобы обеспечить требуемое пространственное положение корпуса аппарата; блока преобразователей декартовых координат концов ног в угловые координаты звеньев ног, который состоит из шести идентичных нелинейных трехмерных следящих систем, обеспечивающих формирование сигналов на входы блока усилителей следящих систем, а также учет границ рабочих зон ног.
Блочное построение системы управления с относительно небольшим числом каналов связи блоков друг с другом обеспечивает удобство работы с системой, позволяет вести настройку и проверку качества работы отдельных блоков, а также легко контролировать функционирование в целом.
История создания «многоногих» роботов
Однако не менее интересно вернуться к истории создания первых шагающих роботов. Существует несколько вариантов историй современных механизмов - обычная, которую мы изучаем по курсу физики, и неофициальная - история человеческих фантазий, которую можно проследить по множеству фантастических романов, кинофильмов, исторических материалов. И совсем не ясно, за какой из них - истина. Взять хотя бы рисунки Леонардо Да Винчи, по которым построили велосипед и вертолет, или произведения Жюля Верна, в которых присутствовало большое множество неизвестных его современникам устройств, ничего особенного на сегодняшний день не представляющих. И вы думаете, читая или смотря кинофильмы о роботах, киборгах, андроидах и прочих новомодных устройствах, их не увидят наши потомки? Отнюдь. Не так давно прошла новость о том, что в Японском Национальном институте современных промышленных наук и технологий (AIST) при сотрудничестве компании Kawada Industries был создан очередной робот человеческого типа. У него такой же рост (154 см) и вес (58 кг). Он может самостоятельно ходить, садиться, ложиться и вставать, и даже носить груз, правда, пока не слишком тяжелый - 6 кг. Но, как вы понимаете, это не предел. Поэтому весьма правдоподобным представляется появление в течение ближайших 10-20 лет первого человекоподобного существа с развитым искусственным интеллектом.
Но первыми кончено были идеи. На рисунке из XVIII века изображена машина, передвигающаяся с помощью ног и колес (авторство рисунка не установлено). Причем главным движущим механизмом являются именно ноги. Думается, это была традиционная для того времени идея, поскольку люди перемещались на телегах, каретах и т.п. И что первое придет в голову, если захочется модернизировать данный вид транспорта?
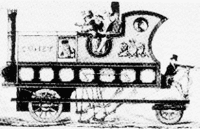
 Вторая, более знаменитая идея, принадлежит Джорджу
Муру (The Steam Man - 1893 год) - это был андроид образца XIX века. Правда,
реализоваться данный проект не смог, хотя и получил большую известность.
Вторая, более знаменитая идея, принадлежит Джорджу
Муру (The Steam Man - 1893 год) - это был андроид образца XIX века. Правда,
реализоваться данный проект не смог, хотя и получил большую известность.
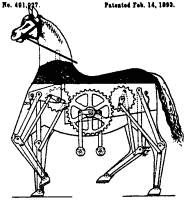
В 1983 году имела место еще одна очень интересная идея - совмещение лошади и велосипеда - The Mechanical Horse (рис.3). Принадлежит она Л. А. Риггу. Вслед за механизацией телеги или кареты изобретатель предложил модернизацию лошади. Интересно, почему проект заморозили?
И действительно, во время первой мировой войны данные футуристические идеи стали реализоваться. Первым стало появление уже сконструированного и собранного механизма Walking Machine, показанного на рисунке. Данная машина передвигалась только с помощью большого количества ног, работающих практически по принципу гусеничного механизма...
Другой вариант - это шагающий трактор, разработанный в это же время. Как мы можем видеть, сзади у механизма находятся две шагающие ноги, приводящие механизм в движение, а спереди - колеса. Получается телега наоборот. Это была первая реализация сочетания механических ног и колес в одной.
На какое-то время в истории шагающих машин наступило затишье вплоть до технологического прорыва 60-70-х. На рисунке вы можете увидеть изобретение 1966 года, реализованное МакГи и Франком в университете Южной Калифорнии. К этому стоит добавить, что это первое изобретение подобного рода, предусматривающее компьютерное управление. Называется оно Phoney Poney.
В 1968 году Р. Мошер завершил работу над созданием настоящего четырехногого монстра с ручным управлением под названием General Electric Walking Truck. Кстати, его изображение можно часто увидеть на многих научных и околонаучных сайтах. Что интересно, у Phoney Poney, так же, как и у General Electric Walking Truck, было по четыре ноги.
В 1973 году целая команда советских ученых завершила работу над практической реализацией шестиногой машины (доктор наук, профессор В.С. Гурфункель, доктор наук А. Ю. Шнейдер, доктор Е.В. Гурфункель и коллеги).
1977 год был весьма урожайным на всевозможные реализации шагающих роботов. Началось своего рода соревнование между США и СССР, что было нормально для того времени. С американской стороны выступал тот же МакГи со своей командой, с советской - профессор Гурфункель и коллеги. Причем русские "шестиноги" назывались очень просто - "Маша". Их мы можем увидеть на рисунках.
В ответ на "Машу" МакГи и команда предложили свою версию шестиногого робота, которая весила всего... 136 кг.
С 1976 года по 1979 в исследовательском центре Komatsu Ltd. (Япония) разрабатывался супер-робот. Таким образом, можно отметить, что, начиная с этого периода, к гонке среди разработчиков присоединяются японцы. Устройство под названием ReCUS (Remotley Controlled Underwater Surveyor) имело восемь ног, 8 метров длины, 5,35 ширины и 6,4 метра высоты. Весить такая конструкция должна была порядка 29 тонн. Максимальная скорость - 0,07 м/с. До нас же дошли только чертежи.
В 1979 году к московским разработкам профессора Гурфункеля присоединился Санкт-Петербург (тогда Ленинград). Там был также разработан и сконструирован "шестиног", но с гораздо более скромными параметрами: вес - 40 кг, длина - 60 см, ширина - 25 см, высота ног - 20 см. И, кстати, такое стремление к минимализму очень свойственно для многоногих устройств. Во-первых, они проще в реализации. Во-вторых, в большинстве своем такие устройства имели чисто научное значение.
Но вместе с тем в период 1980-1983 гг. американцы продолжили развитие тяжелых роботов с большим количеством ног. Изобретатели Сазерленд и Спрулл создали машину длиной в 2,4 метра, развивающую скорость 0,11 м/с.
Далее свою веху в историю вписывают японцы. Живая легенда - TITAN III и TITAN IV (TITAN - аббревиатура от Tokyo Institute of Technology, Aruku Norimono). Ноги TITAN III были оснащены специальными сенсорами, которые были связаны со специальной электронной системой управления, именуемой PEGASUS (Perspective Gait Supervisory System). Данная система позволяла адаптировать движение механизма относительно изменений поверхности. Этот этап можно смело назвать этапом внедрения интеллекта в шагающие машины. Длина ног у TITAN III была 1,2 м и весил он 40 кг. Глядя на рисунок, нельзя не вспомнить персонажа мультипликационного фильма "Тайна третьей планеты". Может быть, TITAN III был прототипом...
Назначение шагающих роботов, роботы-андроиды
А зачем собственно нужны шагающие роботы? В таких механизмах есть практическая необходимость. Вспомните хотя бы забуксовавшие колесные машины - эту частую картину при бездорожье. Шагающие механизмы лучше преодолевают препятствия, и в этом их главное преимущество.
Японские разработки TITAN III и TITAN IV принадлежат Токийскому технологическому институту (Tokyo Institute of Technology) - одни из первых шагающих механизмов с искусственным интеллектом, позволяющим преодолевать несложные препятствия. Так, TITAN IV в 1985 году в Government Pavilion of the Science Exhibition at Tsukuba в полугодовой период опытов прошел около 40 километров по поверхности с тремя степенями сложности. Эта модель весила около 160 килограмм, а длина одной ноги (всего их было шесть) составляла около 1 м 20 см. Причем интересно, что такая махина развивала скорость 40 см/с. TITAN IV был прототипом для множества последующих разработок японских изобретателей. Перечислять нет смысла, так как их много.
Начиная с этого момента, шагающие роботы стали разрабатываться и для практических целей, например, для исследования морских глубин. Акваробот (Aquarobot) разрабатывался в лаборатории роботов в Port Harbour Research Institute Министерства транспорта Японии на протяжении четырех лет (1985-1989).
Расстановка сил среди стран, конструирующих шагающие механизмы, несколько изменилась. В основном, это связано с тем, что ушли русские (у нас тогда, если вы помните, началась перестройка, а потом развал СССР), но при этом достаточно интересные разработки стали появляться и в Англии, в 90-х присоединилась Канада. А лидерами стали, конечно же, японцы и американцы.
Кстати, сейчас такие роботы-многоножки активно используются для различных прикладных целей.
Если не говорить о шагающих роботах, а только об их конечностях, то мы можем найти еще одно применение данным разработкам, а именно - в медицине. Еще в 1948 году русский профессор Н. А. Бернштейн нарисовал человека с протезами, повторяющими скелет ноги, но с электрическими двигателями, что являлось разработкой НИИ Протезии. Стоит отметить, что сразу после войны это было очень насущным изобретением, к сожалению, не имевшим практического продолжения в будущем. В 60-е годы General Electric развила данную идею, но в варианте полноценного скелета с гидравлическим управлением. Точно такая же попытка была и с русской стороны в России (Ленинград, 1970 год).
Основной задачей ученых являлось все-таки создание человекоподобного робота. И нужно сказать, что - это только одна из ветвей развития шагающих механизмов. Ведь, согласитесь, роботы с большим количеством ног больше похожи на насекомых как внешне, так и по способу передвижения. А вот создание двуногих машин - это ближе к рассказам фантастов, которыми зачитывались в детстве наши ученые и изобретатели.
На самом деле сейчас наиболее доступны материалы по истории шагающих механизмов. Удивительно, но она существует. Настоящее скрыто под завесой тайны. Лишь иногда проскакивают новости, которые могут настораживать. Например, майки с датчиками температуры (электроника вживлена в ткань, следовательно, ее можно вживить в любой полимерный материал), робот учится кунг-фу, самообучающиеся игрушки роботы-собаки и так далее. Будущее шагающих механизмов мы уже знаем из фантастики. Все предсказания сбываются с точностью как у Жюля Верна.
Что удивительно, если бы технологии шагающих механизмов развивались чуточку быстрее, то мы бы совершенно по-другому представляли себе сейчас луноход. Сейчас же мы приступим непосредственно к андроидам, будущим человекоподобным киборгам.
Двуногие машины имеют не менее богатую историю, по сравнению с другими шагающими механизмами. Но исторический обзор начнем с 1964 года, когда ленинградскими учеными была создана кинематическая модель Чебышева с двумя ногами. Советские ученые внесли не очень большую лепту в историю создания двуногих машин. Так, в 1990 году в Москве профессором Формальским и доктором Ленским была создана модель двуногого робота, очень похожего внешне на данную кинематическую модель. Но такого прогресса в данной сфере разработок, как в Японии, в СССР, конечно, не было.
В 1969 году Иширо Като (Япония) показал миру антропоморфный двуногий механизм WAP-1. Интересным в данной разработке было то, что мышцы сделаны из резины или каучука и устройство приводилось в движение с помощью пневматики за счет воздействия на "искусственные мускулы". Это очень новаторская идея, которая совмещает в себе и простоту, и гениальность. Иширо Като работал при поддержке специальной исследовательской лаборатории гуманоидов (Humanoid Research Laboratory) при Waseda University (Токио). Интересен сам факт существования таковой в конце 60-х, в то время как для Японии это были не лучшие годы. И нужно сказать, результат очевиден, поскольку за Иширо Като стоит большая часть истории современных двуногих машин.
Уже в 1970 году появилась усовершенствованная модель WAP-2. В ней были разработаны специальные управляемые приводы, при этом под подошвы робота встраивались специальные датчики давления, что позволяло осуществить автоматический контроль положения.
В 1971 году состоялось сразу две премьеры, а именно - WAP-3 и WL-1. Обе они равноценны по значимости в истории шагающих механизмов. WAP-3 - это продолжение модели WAP-2, но, в отличие от предшественника, он имел спереди центр тяжести, что позволяло наклоняться и перемещаться не только по ровной поверхности, но и спускаться/подниматься, например, по лестнице. Таким образом, это был первый в мире робот, способный перемещаться не только по горизонтальной плоскости. WL-1 - это модель, управляемая мини-компьютером. Она так же, как и WAP-3, имела центр тяжести, расположенный спереди, но при этом могла менять направления ходьбы, что стало возможным за счет внедрения мини-компьютера.
В 1972 году в МГУ была разработана модель под именем "Рикша". В движение она приводилась с помощью двух ног, но между тем имелось еще и четыре колеса.

В 1973 году в Японии (Иширо Като) стартовал проект WABOT-1, целью которого было создание полностью функционирующего антропоморфного робота. Помимо систем контроля управления, в WABOT-1 были встроены видео- и звуковая системы, которые позволяли оценивать расстояние до объектов и направление к ним. Таким образом, это одна из первых роботов-машин, которая имела "глаза" и "уши". Ко всему прочему WABOT-1 имел внешние рецепторы и звуковоспроизводящую систему (умел говорить). То есть, первый андроид был создан в 1973 году.
В 1980 году Иширо Като разработал WL-9DR, управляемый с помощью 16-разрядного мини-компьютера. При этом если в предыдущих моделях "обдумывание" механизмом каждого шага составляло более чем 45 секунд, то в варианте WL-9DR на один шаг тратилось всего десять секунд. Роботы учатся ходить! И скорость у них измеряется пока в странной величине - сек/шаг.
И в 1983 году появилась модель WL-10 и на "обдумывание" шага тратилось около четырех с половиной секунд (если быть точным - 4,4 сек/шаг). В модели WL-10R применялись новые типы серво-механизмов и материалов. Значительно добавлена степень свободы у членов робота. WL-10R мог свободно поворачиваться, ходить вперед и назад. Теперь стали насущны еще одни параметры для шагающих механизмов, а именно - степени свободы.
1984 год. Команда ученых токийского университета создает двуногого робота с восемью степенями свободы. При этом данный робот уже имел автономное питание от источника постоянного тока.
В 1985 году Иширо Като создает WL-10RD. Теперь робот затрачивает от 2 до 5 секунд на каждый шаг. При совместной работе с Hitachi Ltd. модель WL-10R находит свое продолжение и в другом варианте - WHL-11 (Waseda Hitachi Leg-11). В WHL-11 был добавлен компьютер и гидравлический привод.
Как мы понимаем, роботы уже научились ходить, говорить... А вот главным событием было появление WASUBOT (аббревиатура от WAseda SUmitomo roBOT) от того же Иширо Като. WASUBOT - это робот-музыкант, который играет на пианино. Фотография, представленная на рисунке, обошла весь мир.
С тех пор прошло много времени. Роботы научились думать, ходить, говорить, видеть, слышать и даже самообучаться. Думаю, читали новость о том, что в Китае робота обучают кун-фу. При этом дополнительно при таком "обучении" можно усовершенствовать четкость движений механизмов и приводов.
Современные компьютерные технологии позволяют улучшить системы управления. Современные химики создают отличные полимерные материалы, которые могут являться заменителем кожи. При этом в такие материалы можно встраивать электронику. Так что в "Терминаторе-4" может играть уже не Шварценеггер, а реальный терминатор.
Заключение
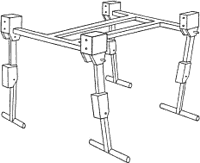
И в заключение хочу остановиться на одной из современных разработок в области шагающих роботов: "Шагающее кресло" под кодовым названием WL-16 создано совместно с Tmsuk, фирмой по производству роботов. Две его "ноги" приводятся в движение при помощи 12 приводов, работающих от аккумуляторной батареи. Робот может носить человека, весящего до 60 килограмм. Этот шагающий робот, специально приспособлен к переноске людей. Его создатели утверждают, что с помощью робота инвалиды смогут передвигаться по лестницам или по неровной поверхности. Создатель робота Атсуа Таканиши - 45-летний профессор университета Васеда в Японии - говорит, что всю жизнь мечтал создать машину, похожую на героя мультика из его детства. Машина способна подстраиваться под седока и двигаться гладкой походкой, даже если сидящий на ней человек ерзает в кресле. Сам Таканеши предпочитает называть свое детище "шагающим креслом", и надеется создать технологическое подспорье для инвалидов - кресло, управляемое джойстиком и способное передвигаться по лестнице. По словам директора Tmsuk Йоичи Такамото, для построения работающей модели на основании нынешнего прототипа понадобится около двух лет.
Как сказал герой известного фильма: «Я пришел не рассказать, как все закончится – я пришел сказать, что все только начинается».
Для подготовки данной работы были использованы материалы с сайта http://www.referat.ru/