Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология и педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Рефераты по сексологии
Рефераты по информатике программированию
Краткое содержание произведений
Реферат: Автоматизированные технологические комплексы
Реферат: Автоматизированные технологические комплексы
Содержание.
Ø 1.Введение 2стр.
Ø 2.Основные технические характеристики 6стр.
Ø 2.1.Регулирующая модель 6стр.
Ø 2.2.Логическая модель 9стр.
Ø 2.3.Пульт настройки ПН-1 12стр.
Ø 2.4.Блок питания БП-1 14стр.
Ø 2.5.Блок усилителей сигналов резистивных датчиков
Ø БУС-10 14стр.
Ø 2.6.Блок усилителей сигналов низкого уровня и
Ø термопар БУТ-10 14стр.
Ø 2.7.Блок усилителя БУМ-10 18стр.
Ø 2.8.Блок БПР-10 18стр.
Ø 2.9.Блок "шлюза" 20стр.
Ø 2.10.Устройство связи с объектом УСО 20стр.
Ø 2.11.Организация внешних соединений 21стр.
Ø 2.12.Сигналы и параметры настройки 21стр.
Ø 3.Функциональные возможности 24стр.
Ø 3.1.Виртуальная структура 24стр.
Ø 3.2.Общие свойства алгоритмов и алгоблоков 25стр.
Ø 3.3.Ресурсы требуемых алгоритмов 28стр.
Ø 4.Подготовка и включение РЕМИКОНТ Р-130 29стр.
Ø 4.1.Подготовка блока контроллера БК-1 к работе 30стр.
Ø 4.2.2.Тестирование 30стр.
Ø 4.2.3.Приборные параметры 33стр.
Ø 4.2.4.Системные параметры 36стр.
Ø 4.2.5.Алгоритмы 37стр.
Ø 4.2.6.Конфигурация 38стр.
Ø 4.2.7.Настройка 39стр.
Ø 4.2.8.Начальные условия 40стр.
Ø 4.2.9.Операции с памятью 40стр.
Ø 4.2.10.Контроль ошибок 42стр.
Ø 4.3.Настройка и контроль 42стр.
Ø Приложение
Ø 1.Основные технические характеристики 43стр.
Ø 2.Коды ошибок в подтверждении блока "шлюз"
Ø 3.Ресурсы, требуемые алгоритмом
Ø 4.Модификация регуляторов
Ø 5.Неисправности типа "отказ"
Ø 6.Неисправности типа "ошибка"
Ø 7.Библиотека алгоритмов
ВВЕДЕНИЕ.
Широкое распространение сложных автоматизированных технологических комплексов, включающих в себя технологические объекты управления (ТОУ) и автоматизированные системы управления технологическими процессами (АСУ ТП), требует достаточно высокого уровня подготовки обслуживающего их персонала. Сложность такой подготовки обусловлена техническим прогрессом в электронной и приборостроительной промышленностях. За последнее десятилетие эти отросли освоили выпуск средств автоматического контроля, управления и регулирования нового поколения на основе микропроцессорной и вычислительной техники. Этиприборы , обладают широкими функциональными возможностями, имеют не очень высокую стоимость позволяют строить автоматизированные системы управления технологическими процессами на небольших предприятиях. Совместимость этих средств с вычислительными средствами ( в частности персональными ЭВМ), позволяет применять существующие программные средства для формирования управляющих возможностей и отображения информации о состоянии процесса. Все это делает АСУ ТП гибкой, более наглядной легко управляемой. Однако, за этой кажущейся простотой, скрывается высокая сложность применяемых технических средств, постичь которую необходимо находясь на учебной скамье. Поэтому, в настоящее время, в учебный процесс стали внедряться учебно-производственные комплексы, имитаторы и тренажеры, позволяющие максимально приблизить процесс обучения к производственным условиям. Решая различные учебные задачи с помощью таких средств, студенты постигают принцип действия применяемых средств, их функциональные возможности и применение. Именно эти цели преследует данная техническая разработка учебного комплекса РЕМИКОНТ Р 130 для моделирования типовых звеньев и систем АСР в целом. В цикле практических занятий и лабораторных работ студенты знакомятся со всеми функциональными блоками и узлами изделия РЕМИКОНТ Р 130 , выполняют операции по предустановочной проверке и подготовке микропроцессорных средств управления и регулирования, их технологического программирования и запуска в работу. На примере моделирования типовых звеньев АСР студенты знакомятся с применением проектирования алгоритмических структур, с характеристиками алгоритмов ввода-вывода и обработки поступающей измерительной информации.
Полученные на этапе значения и практические навыки используются для выполнения задания более высокого уровня - моделирования автоматической системы регулирования . Это дает возможность применять комплекс в процессе курсового и дипломного проектирования для оценки качества регулирования в проектируемой АСР. Проделанный цикл практических занятий и лабораторных работ не является окончательным и может развиваться и совершенствоваться путем постановки новых учебных задач.
1. Общие сведения об изделии РЕМИКОНТ Р 130.
РЕМИКОНТ Р-130 - это компактный малоканальный многофункциональный контроллер общепромышленного назначения, обеспечивающий автоматическое регулирование и логическое
управление технологическими процессами. Эффективность применения РЕМИКОНТ Р-130 обеспечивается за счет высокой надежности реализуемых как простых, так и достаточно сложных
функций управления небольшими агрегатами в низовых звеньях автоматизированных систем управления технологическими процессами (АСУТП). Приборостроительная промышленность выпускает РЕМИКОНТ Р-130 двух модификаций - регулирующий и логический. Регулирующая
модель предназначена для решения задач автоматического регулирования технологических параметров. Логическая модель реализует логический режим программного пошагового
управления. Регулирующая модификация позволяет реализовать локальное , каскадное , программное , супервизорное , многосвязное регулирование. Архитектура этой модели обеспечивает возможность вручную и автоматически включать, отключать, переключать и реконфигурировать контуры регулирования, причем все эти операции выполняются безударно независимо от сложности структуры. В сочетании с обработкой аналоговых сигналов эта
модель позволяет выполнять также логические преобразования сигналов и вырабатывать не только аналоговые или импульсные , но и дискретные команды управления. Логическая модель РЕМИКОНТ Р-130 формирует программу шагового управления с анализом условия выполнения каждого шага, заданием контрольного времени на каждом шаге и условным или безусловным переходом программы к заданному шагу. В сочетании с обработкой дискретных сигналов эта модель позволяет выполнять также разнообразные функциональные преобразования аналоговых сигналов и вырабатывать не только дискретные, но и аналоговые управляющие сигналы. Основным элементом РЕМИКОНТ Р-130 является блок контроллера БК-1, на лицевой панели
которого расположены органы контроля и управления , позволяющие вручную изменять режимы работы , устанавливать задание , управлять ходом выполнения программы, вручную управлять
исполнительными устройствами, контролировать сигналы и получать исполнительными устройствами, контролировать сигналы и получать сообщения об ошибках. Стандартные аналоговые и дискретные и дискретные датчики и исполнительные устройства подключаются к
РЕМИКОНТУ Р-130 с помощью индивидуальных кабельных связей. РЕМИКОНТУ Р-130 с помощью индивидуальных кабельных связей. Обработка сигналов внутри контроллера выполняется в цифровой форме. Блоки, как регулирующей, так и логической модели могут объединяться в локальную управляющую сеть "Транзит" кольцевой конфигурации, при этом для такого объединения никаких дополнительных устройств не требуется. Обмен информацией между
контроллерами осуществляется по двухпроводной линии. С помощью блока "Шлюз", входящего в состав РЕМИКОНТ Р-130, сеть "Транзит" может взаимодействовать с любым внешним абонентом, например ПЭВМ, имеющим соответствующий интерфейс. Микропроцессорный контроллер является программируемым устройством. Однако каких-либо особых знаний программирования от оператора не требуется. Процесс программирования сводится к тому , что путем последовательного нажатия нескольких клавиш из библиотеки , "зашитой" в постоянное запоминающее устройство (ПЗУ), извлекаются нужные алгоритмы , которые затем объединяются в системы заданной конфигурации и в них устанавливаются требуемые параметры настройки. Введенная информация может сохраняться в ПЗУ при отключении сетевого питания за счет питания от встроенной гальванической батареи. Для обеспечения нормальной работы блока контроллера БК-1, преобразующего и обрабатывающего аналоговую и дискретную информацию в цифровой форме, используется ряд дополнительных блоков. Эти блоки предназначены для усиления сигналов, идущих от датчиков естественных сигналов и преобразования их в унифицированные, а также формирования дискретных сигналов напряжением 220 В , организации внешних переключений и блокировок. РЕМИКОНТ Р-130 снабжен средствами самодиагностики, сигнализации и идентификации неисправностей, в том числе при отказе аппаратуры или выходе сигналов за допустимые границы.
1.1. Состав комплекса.
Перечень блоков и узлов входящих в состав изделия РЕМИКОНТ Р 130
Табл. 1.1
|
Обозначение |
Наименование |
| БК-1 | Блок контроллера |
| ПН-1 |
Пульт настройки для технологического програм мирования блока контроллера |
| РН-1 | Резисторы нормирующие |
| МБС | Межблочный соединитель |
| КБС-0 | Клеммно-блочный соединитель для размножения общих точек |
| КБС-1 | Клеммно-блочный соединитель для реализации приборных цепей БК-1 и подключения нагрузки к блокам БУТ-10,БУС-10 и БУМ-10 |
| КБС-2 | Клеммно-блочный соединитель для дискретных цепей ввода-вывода БК-1 и БПР-10 |
| КБС-3 | Клеммно-блочный соединитель для аналоговых цепей ввода-вывода БК-1 |
| БП-1 | Блок питания |
| БУТ-10 | Блок усилителей сигналов низкого уровня |
| БУС-10 | Блок усилителей сигналов низкого уровня резистивных датчиков (термосопротивлений) |
| БУМ-10 | Блок усилителей мощности |
| БПР-10 | Блок переключений |
| БСТ-1 | Блок стирания |
| БШ 1 | Блок шлюза |
2.ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ.
Блок контроллера БК-1
Блок контроллера БК-1 выполняет функции: 1) преобразования аналоговых и дискретных входных сигналов в цифровую форму; 2) преобразования сигналов, представленных в контроллере в цифровой форме, в аналоговые и дискретные выходные сигналы; 3) обработки поступающей информации в соответствии с требуемыми алгоритмами управления; 4) обработки дискретных аварийных сигналов; 5) приема и передачи сигналов через интерфейсный канал цифровой
последовательной связи; 6) оперативного контроля и управления с помощью индикаторов и клавиш, расположенных на лицевой панели блока. На задней панели блока БК-1 расположен легкосьемный
аккумулятор, состоящий из 3 элементов подключенных непосредственно к модулю процессора без разрушения информации.
2.1. Регулирующяя модель РЕМИКОНТ Р-130.
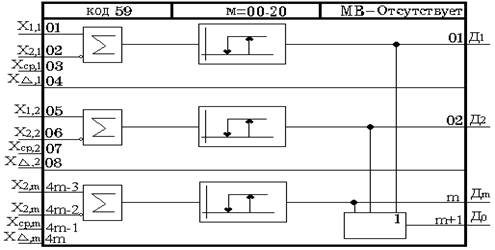
В регулирующей модели предусмотрено: 1. Организация до четырех контуров локального или каскадного регулирования, с аналоговым или импульсным выходом, с ручным, программным (или
многопрограммным) или супервизорными задатчиками; 2. разнообразное сочетание (в зависимости от требований заказчика) аналоговых и дискретных входов-выходов; 3. "библиотека" включает
в себя более 76 записанных в ПЗУ алгоритмов непрерывной и дискретной обработки сигналов, включая алгоритмы ПИД-закона регулирования математических, динамических, нелинейных,
аналоговых и логических преобразований; 4. до 99 алгоритмических блоков (алгоблоков) со свободным внесением в них любых алгоритмов из библиотеки и свободным конфигурированием между собой и с входами и выходами контроллера; 5. ручная установка любых коэффициентов настройки в любых алгоритмах и автоподстройка их в процессе работы; 6. безударные (*) изменения режимов управления и безударное включение, отключение, переключение, изменение конфигурации контуров регулирования любой степени сложности; 7. формирование нескольких (до 47 программ), с возможностью оперативного выбора нужной программы . 8. объединение до 5 контроллеров в локальную регулирующую сеть "Транзит", в которой контроллеры могут обмениваться информацией. Сеть также допускает включение в нее логических моделей
контроллера.
Оперативное управление Регулирующей модели
Для оперативного управления на лицевой панели блока контроллера БК-1(01) расположены следующие органы контроля и управления:
- пять ламповых индикаторов устройства контроля ошибок;
- одноразрядный цифровой индикатор номера контура регулирования;
- четырехразрядный цифровой индикатор "Задание";
- четырехразрядный цифровой индикатор группы "Режим контроля";
- семь ламповых индикаторов группы "Режим контроля";
- шкальный индикатор "Выход"; - четыре ламповых индикатора "Режим
управления";
- три ламповых индикатора "Режим задания";
- двенадцать клавиш оперативного управления блоком;
- разъем для подключения пульта настройки ПН-1. Одноразрядный цифровой индикатор "Контур" показывает номер контура регулирования с которым работает оператор. При этом на цифровой
индикатор "Задание" выводится заданное значение регулируемого параметра для данного контура. На цифровой индикатор группы "Режим контроля" в зависимости от выбора могут быть выведены значения следующих параметров:
Вх - значение входной величины(регулируемого параметра);
Е - значение сигнала рассогласования (ошибки);
Вых - значение выходной величины (регулирующего воздействия);
Z - значение произвольного сигнала, назначение которого программируется;
Nп - номер программы программного задатчика;
tп - время, оставшееся до окончания текущего этапа программы программного задатчика;
ОК - ошибка контура(указывается номер сигнала, значение которого вышло за допустимые пределы. Шкальный индикатор "Выход", имеющий двадцать один сегмент, предназначен для отображения значения сигнала на выходе контура регулирования(регулирующего воздействия) или
положения исполнительного механизма(регулирующего органа) в пределах от 0 до 100%. Находящиеся рядом два индикатора /\ \/ сигнализируют о срабатывании импульсного регулятора "Больше - Меньше". Четыре индикатора группы "Режим управления" отображают режим работы
контура:
КУ - каскадное управление;
ЛУ - локальное управление;
ДУ - дистанционное управление;
РУ - ручное управление.
Три индикатора группы "Режим задания" сигнализируют режимы формирования задания:
ВЗ - внешний задатчик;
ПЗ - программный задатчик;
РУ - ручной задатчик.
2.2. Логическая модель РЕМИКОНТ Р-130.
Максимальное число независимых одновременно выполняемых программ 4. Максимальное число этапов (при условии, что число алгоблоков не превышает 99) 89 Максимальное число шагов в каждом этапе 29 выполнение программы однократное, многократное, циклическое.
Максимальное число многократных повторений программы отдельных ее этапов, конфигураций и программы 81) 91. Конфигурации и программы линейная (последовательно шаг за шагом)с разветвлениями по условиям команды управления пуск, стоп, сброс, выбор начального этапа и шага
включения и отключение выхода вручную, пуск одного шага состояние программы пуск, стоп, выбор, пуск одного шага, ожидание, конец программы, контролируемые параметры номер программы, номер повторения, номер этапа, номер шага, время, оставшееся до истечения
контрольного времени состояния программы, состояние до трех дискретных сигналов, ошибки программы.
Оперативное управление
Логической модели.
Лицевая панель предназначена для оперативного управления логическими программами и содержит ламповые индикаторы (ЛИ), цифровые индикаторы (ЦИ) и клавиатуру. На верхней части панели расположены пять ЛИ -контролирующих ошибки. Тридцать два Ли "дискретный контроль" используются для контроля состояния до 32 дискретных сигналов. Одноразрядный ЦИ "прог" (программа) показывает номер программы , с которой работает оператор. Семь ЛИ в группе "режим контроля" указывают, какая информация выводится на четырех разрядный ЦИ. Семь ЛИ в группе "состояние" указывают, в каком состоянии находится программа, а также состояние выхода
текущего шага. Лицевая панель имеет 12 клавиш, с помощью которых ведется оперативное управление логической программой. В нижней части панели расположено гнездо разьема , в которое включается пульт настройки ПН -1.
2.3. Пульт настройки ПН-1
Для технологического программирования настройки и контроля Ремиконта Р-130 используется пульт настройки ПН-1. Он подключается к блоку контроллера БК-1 через разъем, размещенный на его лицевой панели. Единичные индикаторы сигнализируют о режиме работы выбранной процедуре и ошибках. Цифровые индикаторы используются для контроля сигналов и параметров программирования ,,тестирования и т.д. Шесть клавиш используются для выбора режима ,процедур, параметров, для изменения параметров, запуска тестов и т.д. Конструктивно пульт
настройки представляет собой портативный блок калькуляторного типа, который при работе можно держать в руке или класть на стол. Пульт настройки ПН-1 содержит два цифровых индикатора: нижний и верхний, оба имеют по четыре десятичные цифры. На нижнем цифровом индикаторе
кроме того может высвечиваться знак"-". Верхние единичные индикаторы высвечивают сигналы: Ош- ошибка; отказ- отказ блока контроллера; откл.интер.- отключение интерфейса; И п - наличие питания для программирования. В средней части пульта настройки ПН-1 расположены * идентичных индикаторов с последующим назначением процедур в режимах "программ"- программирование и работа, о чем высвечивают единичные индикаторы.
Назначение единичных индикаторов в режиме программирования:
Табл. 1.2.
| ТЕСТ | Тестирование, выполняется тестирование памяти интерфейса |
| ПРИБ | установка приборных параметров |
| СИСТ | установка системных параметров, логический номер контроллера в локальной сети и режим работы интерфейса |
| АЛГ | установка алгоритмов |
| КОНФ | установка конфигурации |
| НАСТР | установка параметров настройки |
| Н.УСЛ | установка начальных условий |
| ППЗУ | работа с ППЗУ; запись, восстановление информации из ППЗУ в ОЗУ,регенерация ПЗУ |
Назначение единичных индикаторов в режиме работа:
Табл 1.3
| ОШ | контроль ошибок |
| ПРИБ | контроль приборных параметров |
| СИОТ | контроль системных параметров |
| ВЫХ | контроль выходов алгоблоков |
| НАСТР | контроль параметров настройки |
| КЛБР | Калибровка, установка "нулей" в алгоблоках и выходных сигналов |
| ВХ | контроль входов алгоблоков |
Методика работы с клавиатурой, составление тест-команд, состав и контроль программы описаны в техническом описании и инструкции по эксплуатации 2.899.550. ТО. Работа пульта настройки аналогична работе лицевой панели.
2.4. Блок питания БП-1
Блок питания подключается к промышленной сети переменного токанапряжением 220 или 240V и вырабатывает три стабилизированных напряжения 24V постоянного тока. Эти напряжения используются для питания: 1) блока контроллера БК-1 2) цепей дискретного входа-выхода
БК-1 3) цепей аналогового выхода БК-1 4) интерфейсных цепей БК-1 5) цепей аварийного выхода БК-1 6) усилителей БУТ-10 и БУС-10 Кроме того, блок питания БП-1 обеспечивает безразрывность локальной управляющей сети "Транзит" при отказе одного из подключенных к сети контроллеров, а также имеет релейный вход, сигнализирующий об отказе блока контроллера. Блок БП-1 применяется лишь в случае ,когда у потребителя отсутствует приборная сеть с напряжением 24V или когда требуется объединить контроллеры в локальную сеть "транзит".
2.5. Блок усилителей сигналов резистивных датчиков БУС-10
Усилитель БУС-10 преобразует изменение сопротивления резистивных датчиков (термопреобразователей сопротивления, реохордов) в токовый сигнал 0-5мА. Усилитель БУС-10 обеспечивает также настройку начального значения сопротивления (соответствующего нулевому
выходному сигналу) и диапазона измерения сопротивления (соответствующего изменению выходного сигнала на 5мА). К блоку БУС-10 по трех проводной схеме могут подключаться как термометры сопротивления ,так и резистивные датчики. Один блок БУС-10 содержит два независимых канала усиления имеющих одинаковую настройку.
2.6. Блок усилителей сигналов низкого уровня и термопар БУТ-10.
Усилитель слаботочных сигналов БУТ-10 является связующим узлом между датчиками естественного сигнала и блоком контроллера БК-1 и выполняет следующие функции: 1. преобразование сигнала измерительной информации в унифицированный сигнал постоянного тока 0-5 мА; 2. обеспечивает конфигурацию изменения температуры свободных концов термопары; 3. обеспечивает смещение пути входного сигнала и растяжку диапазона изменения входного сигнала.
Один усилитель содержит два независимых канала усиления, рассчитанных на одинаковую термопару и имеющих одинаковую настройку. Усилитель может использоваться и не только для усиления сигнала термопары, но также для усиления напряжения низкого уровня, получаемого от
источника Э.Д.С. Вход и выход каждого канала усилителя гальванически связанны, однако между собой и от источника питания каналы гальванически изолированны. Т.к. выход усилителя
подключается к гальванически изолированному аналоговому входу контроллера, каждая термопара оказывается гальванически изолированный от других цепей.
Технические характеристики блока усилителя сигналов термопар БУТ-10.
Табл. 1.4.
Наименование параметров |
Значение |
| Число каналов усиления | 2 |
Параметры питания (постоянный ток): напряжение, В |
24 |
| Ток (типовое значение),мА | 60 |
| Градуеровка термопары | ХК,ХА,ПП,ПР,ВР-1,ВР-2,ВР-3 |
| Настройка ,мВ: | |
| Начальное значение диапазона | 1;2;5;10;15;25;40;60;80;100. |
| Диапазон | 0;2;4;6;8;10;12;14;16;18;20;25;30;40. |
| Выходной сигнал, мА | 0-5 мА. |
| Максимальное сопротивление нагрузки ,кОм | 1 |
Подключение термопар осуществляется с помощью клеммой колодки, находящейся на лицевой панели блока. Питание осуществляется через разъем РП 15-9 от блока питания Усилитель БУТ-10 выполняет следующие функции:
1)преобразовывает сигнал термопары типов ТХА,ТХК,ТВР,ТПП,ТПР в токовый сигнал 0-5 мА; 2)обеспечивает компенсацию термо ЭДС свободных концов термопары;
3)обеспечивает подавление нуля входного сигнала и растяжку диапазона изменения входного сигнала. Один блок БУТ-10 содержит два независимых канала усиления рассчитанных на одинаковую термопару и имеющих одинаковую настройку.
2.7. Блок усилителя БУМ-10
Усилитель БУМ-10 содержит четыре сильноточных герконовых реле типа РПГ-8 с одним замыкающим контактом, контакты которых могут коммутировать постоянное или переменное напряжение. Обмотки реле подключаются к дискретным выходам блока БК-1 либо к другим цепям, при этом для запитки этих обмоток необходимо внешнее напряжение 24V.
Усилители БУМ-10 применяются лишь в том случае, когда необходимо коммутировать высоковольтные и сильноточные нагрузки. В зависимости от числа нагрузок в состав одного РЕМИКОНТА Р-130 могут входить несколько блоков БУМ-10 их число указывается в заказе.
2.8. Блок БПР-10
Блок БПР-10 содержит 8 слаботочных реле типа РЭС-54, перекидные контакты которых могут использоваться в цепях переключения, защиты, , сигнализации, блокировки и т.д. Обмотки реле могут подключаться к дискретным выходам болка БК-1 либо и другим цепям, при этом для
запитки этих обмоток необходимо внешнее напряжение 24V. В
зависимости от требуемого числа реле в состав одного РЕМИКОНТА Р-130 могут входить несколько блоков БПР-10 их число указывается в заказе.
2.9. Блок "шлюза"
Шлюз представляет собой микропроцессорное устройство, предназначенное для связи сети "Транзит" с устройствами верхнего уровня управления, а также для связи сетей "Транзит" друг с другом. В состав шлюза входят:
1)блок шлюза БШ-1;
2)блок питания БП-1;
3)пульт настройки ПН-1;
4)клемно-блочный соеденитель КБС-2. При заказе шлюза БШ-1 входит в комплект поставки всегда, наличие остальных изделий определяется картой заказа. Конструктивно блок шлюза БШ-1 полностью соответствует блоку контроллера БК-1 и имеет одинаковые с ним габаритные подсоеденительные размеры, а также способ монтажа. Блок шлюза содержит модуль процессора ПРЦ10, модуль МКП, модуль стабилизации напряжения МСН10. Все эти модули аппаратно идентичны соответствующим модулям, входящим в состав блока контроллера БК-1.
Кроме того БШ-1 содержит два новых модуля: модуль интерфейсной связи МИСЗ, с помощью которого шлюз связывается с верхним уровнем управления, модуль лицевой панели ПЛЗ.
2.10. Устройство связи с объектом УСО.
К устройствам связи с объектом УСО относятся модули: модуль аналоговых сигналов МАС модуль аналоговых и дискретных сигналов МДА модуль дискретных сигналов МОД Технические характеристики модулей УСО:
1) Погрешность преобразования входных аналоговых сигналов постоянного тока в цифровой двоичный сигнал -0.3% от максимального значения выходного сигнала.
2) Основная погрешность преобразования цифровых двоичных сигналов в выходной аналоговый сигнал сигнал постоянного тока +:-0.5% от максимального значения выходного сигнала.
3) входные аналоговые сигналы
Табл. 1.5.
| Токовые | 0...5мА при входном сопротивлении –500 Ом |
| 0...20мА при входном сопротивлении -100 Ом | |
| 4...20мА при входном сопротивлении -100 Ом | |
| По напряжению | 0...5V при входном сопротивлении -10кОм |
4)выходные аналоговые сигналы
Табл. 1.6.
| Токовые | 0...5мА при входном сопротивлении нагрузки- 2кОм |
| 0...20мА при входном сопротивлении нагрузки-0.5кОм | |
| 4...20мА при входном сопротивлении нагрузки-0.5кОм |
5)дискретные входные сигналы
Табл. 1.7.
| Логический "0" | 2.4V |
| Логическая "1" | 24V +:-6V при входном сопротивлении 5кОм |
2.11. Организация внешних соединений.
Отдельные блоки изделия РЕМИКОНТ Р-130 имеют розетки штепсельных разьемов РП15 для выполнения соединения между собой и другими устройствами. Потребитель может все внешние цепи подключать непосредственно к этим разьемам . Такой вариант предполагает, что у
потребителя имеются собственные клемные сборки, к которым эти внешние устройства подключены. От этих сборок соединения ведутся монтажным проводами, которые припаиваются к вилкам разьемов РП-15. Если у потребителя такие клемные сборки отсутствуют или по условиям монтажа такие соединения недопустимы, используются специальные соеденители, входящие в состав комплекта РЕМИКОНТ Р 130. Межблочный соеденитель МБС применяется для связи приборных цепей блока контроллера с блоком питания. Соеденитель МБС представляет
собой отрезок кабеля, заканчивающийся с обеих сторон вилками разьема РП15.
Клемно-блочный соеденитель КБС-1 представляет собой отрезок кабеля, с одной стороны которого смонтирована вилка разьема РП-15-9 ,а на другой- одноразрядная клемная колодка на 8 клемм. КБС-1 используется для подключения цепей "под винт" к блокам ,имеющим разъем РП-15-9 (блок питания, усилители). Клемно-блочный соеденитель КБС-2 предназначен для подключения внешних устройств к дискретным выходам блока контроллера. КБС-2 представляет собой отрезок кабеля, с одной стороны которого смонтирована вилка разьема РП-15-9 ,а с другой - трехразрядную клемную колодку на 24 клеммы. Клемно-блочный соеденитель КБС-3 предназначен для подключения "под винт" внешних устройств к аналоговым входам-выходам блока контроллера БК-1.
Отличие от КБС-2 заключается в том, что на внутренней стороне клемных колодок распаяны нормирующие резисторы, с помощью которых унифицированные сигналы 0-5мА, 0(4)-20мА, 0-10В преобразуются в сигналы 0-2В. Колодка имеет поле перемычек "под винт", с помощью
которых задается диапазон входных сигналов*. Номиналы нормирующих резисторов, установленных в клемно-блочном соеденителе, аналогичны номиналам резисторов РН. Для диапазона 0-20 и 4-20 мА номинал входного резистора одинаков и рассчитан на сигнал 0-20 мА.
Настройка на диапазон 4-29 мА осуществляется пользователем программно.
2.12.Сигналы и параметры настройки
Не смотря на то ,что выходные сигналы блока контроллера могут лишь двух видов - аналоговые и дискретные, алгоблоки рассчитаны на обработку сигналов ,имеющих большее разнообразие. Это обеспечивается алгоритмами ,связанными с отсчетом реального времен (таймеры,
программные задатчики и т.п.) и со счетом числа событий(счетчики), а также тем ,что параметры настройки алгоритмов задаются с помощью сигналов на настроченных входах и имеют с точки зрения формата большое разнообразие.
Виды сигналов и параметров
Табл. 1.8.
|
Вид сигнала или параметра |
Размерность |
Диапазон измерения |
Минимальный шаг |
|
| Изменения | Установки | |||
| Аналоговый | % | -199.9... 199.9 | 0.012 | 0.024 |
| Временной | с,мин,час | 0-819 и ~ | 0.05 | 0.1 |
| Числовой | - | -8191 ... 8191 | 1 | 1 |
| Дискретный | - | 0 и 1 | - | - |
| Масштабный коэффициент | - | -15.99 ... 15.99 | 0.001 | 0.002 |
| Коэффициент пропорциональности | - | -127.9 ... 127.9 | 0.008 | 0.016 |
| Скорость изменения | %/с,%/мин, %/ч | 0...199.9 и~ | 0.012 | 0.024 |
| Длительность импульса | С | 0.12... 3.84 | 0.12 | 0.12 |
| Технические единицы | - | -1999... 8191 | * | 1 |
* При контроле аналоговых сигналов в технических единицах разрешающая
способность индикации равна (Х100-Х0)/8191 ,но не лучше 0.001; здесь Х100 и Х0 - технические единицы, способствующие стопроцентному и нулевому значениям аналогового сигнала.
Аналоговые сигналы
Аналоговые сигналы формируются на выходах алгоритмов регулирования ,сумматоров, задатчиков, интеграторов и т.п. К аналоговым сигналам относятся параметры настройки, порог срабатывания нуль-органа, уровень ограничения и Т.П. Несмотря на то что входные и выходные сигналы меняются в диапазоне 0...100%, на выходе алгоблоков аналоговый сигнал может меняться в более широком диапазоне -199.9...199.9%. Это позволяет ,например складывать два числа ,каждое
из которых 90% и на выходе сумматора получать правленный результат.
Временные сигналы
Временные сигналы формируются на выходах таймеров, программных задатчиков,одновибраторов и т.п. алгоритмов. К временным сигналам относятся такие параметры настройки , как постоянные времени,протяженность участка, время выдержки и т.п.Конкретная размеренность задается двумя параметрами: диапазоном и масштабом.
Табл.1.9.
| Диапазон (задается для всего контроллера | Масштаб времени (задается индиви-дуально в каждом алгоблоке | Размерность |
| Младший |
МладшийСтарший |
с мин |
| Старший |
Младший Старший |
мин час |
Численные сигналы
Численные сигналы - сигналы на выходах счетчиков и других алгоритмов, работа которых связанна со счетом событий. Числовыми могут быть и параметры настройки, например: число может задать граничное значение сигнала на выходе счетчика, номер этапа к которому
должна перейти логическая программа.
Дискретные сигналы
Дискретные сигналы обычно обрабатываются логическими алгоритмами и алгоритмами связанными с переключением сигналов. Дискретными могут быть и параметры настройки. Например, дискретные сигналы в алгоритме задания определяют, должна ли выполняться статическая балансировка.
Масштабный коэффициент
Масштабный коэффициент - это параметр настройки ряда алгоритмов, где требуется маштабирование, Этот коэффициент используется в алгоритмах аналогового ввода и вывода, в алгоритме суммирования с масштабиророванием и т.п.
Коэффициент пропорциональности
Коэффициент пропорциональности применяется в основном в алгоритмах регулирования в качестве параметра настройки.
Скорость изменения аналоговых сигналов
Скорость изменения аналоговых сигналов - это параметр настройки , задающий , например, скорость изменения сигнала при динамической балансировки или ограничении скорости в алгоритме "Ограничение скорости".
3. Функциональные возможности.
Регулирующий контроллер РЕМИКОНТ Р-130 является программируемым устройством. При подготовке к работе в нем программным путем создается структура, которая описывает информационную организацию контроллера и характеризует его как звено системы управления,
получившая название виртуальной <кажущейся> - т.е. не существующая как физическое тело. Эта виртуальная структура реализуется с помощью как аппаратных , так и программных средств.
3.1. Виртуальная структура.
Основным преимуществом микропроцессорных средств автоматического управления и регулирования является программируемость. Микропроцессорный контроллер по сути является миниатюрной электронной вычислительной масшиной(ЭВМ),решающей конкретную задачу. Как и ЭВМ контроллер имеет порты ввода и вывода информации и арифметическо-логическое устройство
(алгоритмические блоки) для ее обработки. При подготовке контроллера к работе в него вводится программа в которой определяются порты ввода - вывода информации , а также алгоритм его обработки. Таким образом, как бы создается структурная схема .
Рис.1.1.
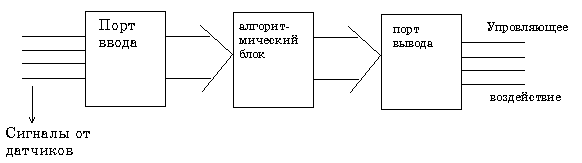
Особенность заключается в том, что эта схема существует не в физическом смысле (в реальности), а на уровне программы, такие структурные схемы получили название
виртуальных-кажущихся. Для того чтобы изменить структуру ничего не надо отключать , переключать. Достаточно ввести новую программу с новой структурной связью и алгоритмом
обработки.
Виртуальная структура.
Виртуальная (кажущаяся) структура описывает информационную организацию контроллера и характеризует его как звено системы управления. Часть виртуальной структуры реализуется с помощью аппаратных средств, а часть - программно. Все программное обеспечение виртуальной структуры хранится в ПЗУ и пользавателю недоступно, независимо от реализации элементов виртуальной структуры.
Элементы виртуальной структуры.
1. Аппаратура ввода-вывода информации.
2. Аппаратура оперативного управления и портом.
3. Аппаратура интерфейсного канала.
4. Алгоритмические блоки.
5. Библиотека алгоритмов.
Аппаратура ввода-вывода информации.
Контроллер предназначен для обработки сигналов двух видов:
1. Аналоговых
2. Дискретных.
Регулирующие воздействия могут выдаваться на вход как в аналоговой так и в дискретной форме. При этом дискретные (импульсные) сигналы формируются программным путем и поступают к исполнительным механизмом через дискретные выходы. Таким образом при обработке аналоговых
сигналов осуществляется двойное преобразование : аналого-цифровое на входе и цифро-аналоговое на выходе Внешние цепи подключаются к контроллеру через два независимых канала А и Б. При этом контроллер может обрабатывать сигналы группы А или сигналы обеих групп. При
алгоритмической обработке сигналы групп А и Б могут "замешиваться" в одни общий массив информации. Все аналоговые и дискретные входы и выходы контроллера полностью универсальны и не привязаны к каким-либо функциям контроллера. Привязка входов и выходов осуществляется
пользователем и реализуется в процессе программирования.
Аппаратура оперативного управления и настройки.
Органы контроля и управления блоком контроллера располагаются на передних панелях и включают в себя цифровые и светодиодные индикаторы, для отображения оперативной информации, и набором клавиш. Этими органами пользуется оператор ведущий технологический процесс. Вид лицевой панели зависит от модели контроллера Пульт настройки -это
инструмент оператора -наладчика. С его помощью осуществляется выбор алгоблоков и алгоритмов обработки информации, а также создается виртуальная структура. Пульт настройки позволяет контролировать промежуточные значения сигналов внутри виртуальной структуры.
Аппаратура интерфейсного канала.
Каждый контроллер снабжен интерфейсом для связи с внешними устройствами (управляющей вычислительной машиной и т.п.),имеющими приемо-передатчик преобразующими передаваемую информацию в виде последовательного кода (биты) в параллельный код (байты).Обмен
информацией осуществляются только в цифровой форме.
Алгоритмические блоки
В исходном состоянии алгоритмические блоки как физическое устройство отсутствуют и ни какие функции по обработке сигналов контроллером не выполняются. Они появляются только тогда , когда в процессе технологического программирования в процессор записывается алгоритм
(программа) обработки сигналов.
Библиотека алгоритмов
Контоллер содержит обширную библиотеку алгоритмов (программ),обработки информации достаточную для реализации сравнительно сложных задач автоматического регулирования и
программного управления. Помимо алгоритмов автоматического регулирования и логико-программного управления в библиотеке имеется большой набор алгоритмов статического, математического, логического и аналого-дискретного преобразования сигналов.
3.2. Общие свойства алгоритмов и алгоблоков.
Входы-выходы алгоритма
В общем случае алгоритм обработки информации характеризуется входными и выходными величинами и может быть представлены в виде.
Рис. 1.2.
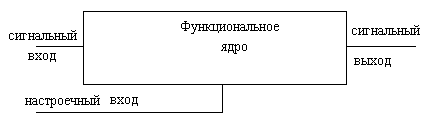
При этом в алгоритме различают два вида входов: а) сигнальные – по которым подается информация подлежащая обработке; б) настроечные - определяющими параметры настройки алгоритмов. Так, например, алгоритм интегрирования входного сигнала по времени может представлен в виде .
Рис. 1.3.
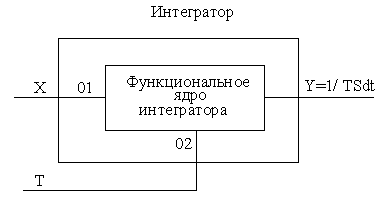 |
Число входов и выходов алгоритма не фиксируется и определяется, в первую очередь, алгоритмом настройки. Число входов любого алгоритма не может превышать 99,а число выходов 26.В частном случае алгоритм может не иметь входов и выходов. Все входе и выходы могут подвергаться конфигурированию. В ряде случаев, некоторые алгоритмы имеют неявные входы и выходы, имеющие специальное назначение и недоступные для конфигурирования. К таким алгоритмам относят алгоритмы ввода-вывода, приемо-передачи оперативного управления.
Например, при программировании какого-либо алгоблока алгоритмом ввода информации, его неявные входы подключаются к АЦП, обрабатывающим сигналом группы А ,а на выходах будут сформированы общедоступные сигналы. Поэтому, если на вход какого-либо функционального алгоритма нужно подать аналоговый сигнал, то этот вход при программировании
следует соединить с соответствующим выходом алгоритма аналогового ввода.
Алгоритм "Ввод аналоговой группы А"
с неявным входом
Рис. 1.4.
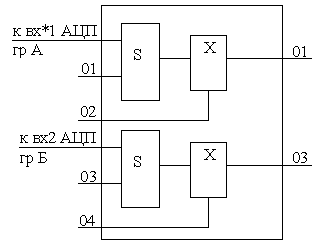
Входы 01-04 - сигналы калибровки.
Выходы 01 и 03 сигналы эквивалентны (с учетом калибровки)
сигналом на аналого вх. вых. Неявные входы обозначаются тонкими линиями.
Все входы, как сигнальные, так и настроечные имеют сквозную нумерацию
от 01 до 99. Выходы алгоритма также нумеруются двузначной цифрой от 01 до 25.
Реквизиты алгоритма.
В общем случае описание алгоритма в библиотеке имеет три реквизита:
1) библиотечный номер;
2) модификатор;
3) масштаб времени. Библиотечный номер представляет собой двух
значную десятичную цифру и является основным параметром, характеризующим свойства алгоритма. В библиотеке есть номера, которые не соответствуют не одному из алгоритмов. Такие номера называются "пустыми", а алгоритм соответствующий этому номеру "пустой". Алгоблок с "пустым" алгоритмом не имеет входов-выходов и никакой работы не выполняет, а также не влияет на работу других алгоблоков, но в ОЗУ занимает определенное место и требует некоторого
времени на обслуживание. Модификатор задает дополнительные свойства алгоритма. Обычно модификатор задает число однотипных операций. Например, в сумматоре модификатор задает число суммируемых входов; в программном задатчике - число участков программы и т.п. В отдельных случаях модификатор задает набор определенных параметров, в алгоритме
контроля контура регулирования модификатор задает параметры контура, локальный контур или каскадный контур, аналоговым или импульсным регулятором и т.д.
Масштаб времени
Масштаб времени имеется только в алгоритмах, чья работа связана с реальным временем, например, в таких как регулирование, программный задатчик, таймер и т.д. Масштаб времени задает одну из двух размерностей для временных сигналов или параметров. Если контроллер в
целом настроен на младший диапазон, то масштаб времени индивидуально в каждом алгоблоке задает масштаб "секунды" или "минуты". Для старшего диапазона масштаб времени задает "минуты" или "часы". Алгоритмы с одним и тем же номером, помещаемые в различные алгоблоки,
могут иметь индивидуальные в каждом алгоблоке модификатор и масштаб времени. Наличие модификатора и масштаба времени существенно расширяет возможности алгоритмов. Например, в одном алгоблоке может размещаться программный задатчик, имеющий несколько участков
программы протяженностью несколько секунд.
3.3. Ресурсы требуемые алгоритмом.
При программировании контроллера следует помнить, что каждый алгоблок использует определенные ресурсы контроллера. К ним относятся время, затрачиваемое на обслуживание, и объем занимаемой памяти. Время, затрачиваемое на обслуживание, зависит от вида алгоритма,
помещенного в алгоблок, и уставного модификатора. В общем случае время, затрачиваемое на обслуживание алгоритма можно определить из соотношения Та=Тб+m*Tm (1.1.) где
Та-время, затрачиваемое на обслуживание алгоритма Тб-базовое время, затрачиваемое на обслуживание алгоблока при значении модификатора m=0 . Тm-дополнительное время, затрачиваемое на обслуживание алгоритма при каждом приращении модификатора на
единицу.
Найденное время Та является определяющим при определении и установлении времени цикла Тц обработки информации. Общее время Таб должно быть меньше Тц. Общее время Таб, затрачиваемое на обслуживание всей алгоритмической структуры, запрограммированной
в контроллере определяется как N Таб=#Тai (1.2.) i=1 где N-число задействованных алгоблоков. Помимо времени обслуживания, алгоблоки используют часть объема оперативной
памяти (ОЗУ), которая необходима для хранения алгоритма и обработки информации. Условно эти области обозначены ОЗУ1 и ОЗУ2. В области ОЗУ1 хранятся значения параметров, которые не записываются в ППЗУ , а в ОЗУ2 параметры, записываемые в ППЗУ. В общем случае объем памяти требуемый алгоблоку Па можно определить из соотношения Паj=Пбj=m*Пм
(1.3.) где Паj- базовый объем памяти, требуемый алгоблоку при модификаторе m=0. Пбj- дополнительный объем памяти, требуемый при приращении модификатора на единицу. Общая область ОЗУ1, требуемая для задействованных алгоблоков N Паб1=#Пa1i
(1.4.) i=1
Аналогично для ОЗУ2.
N
Паб2=#Пa2i (1.5.)
i=1
Свободные области ОЗУ1 и ОЗУ2 представляет собой не использованный ресурс. При программировании контроллера необходимо следить за тем, чтобы объем памяти занимаемый задействованными алгоритмами не превышал ресурсы ОЗУ1 и ОЗУ2. Общий ресурс памяти: ОЗУ1-2300 байт; ОЗУ2-2680 байт.
Процедуры обслуживания алгоблоков.
Обслуживание алгоблоков в блоке контроллера ведется циклически с постоянным времени цикла, значение которого устанавливается при программировании приборных параметров. Цикл обслуживания начинается с алгоблока 01 и продолжается в порядке возрастания номеров. По
истечению времени цикла, обслуживание начинается с алгоблока 01. Время цикла может изменятся в пределах от 0.2 до 2 с. с шагом 0.2 с.С учетом затраченного времени на обслуживание всех алгоблоков Таб время цикла Тц должно превышать эти затраты. Излишки времени т.е. разность
Тц-Таб используется для выполнения процедур самодиагностики. Если в _ оставшееся в цикле время нет возможности полностью выполнить диагностику , то эта процедура растягивается на несколько циклов. Это может привести к несвоевременному выявлению ошибок. Кроме того во
время цикла обслуживание происходит передача и прием информации по интерфейсному каналу. Таким образом Тц>Таб=Тин (1.6.) Если это соотношения не выполняются, необходимо увеличить время цикла Тц или упростить решающую задачу. При выборе времени цикла следует оставлять
резерв, не меньше 0.04-0.08с.
4. Подготовка и включение РЕМИКОНТ Р 130
Регулирующий контроллер РЕМИКОНТ Р-130 является программируемым устройством. Технологическое программирование включает следующие процедуры: тестирование; установку приборных параметров; установку системных параметров; установку алгоритмов в алгоблоки; конфигурирование; установку параметров настройки; установку начальных условий; запись информации в программируемое постоянное запоминающее устройство. Сведения о процедурах
технологического программирования представлены в таблице.
Табл.4.1.
| Процедура | код | Выполняемые операции |
| тестирование | 00 | Комплексный тест ПЗУ и ОЗУ |
| 01-04 | Тестирование микросхем ПЗУ | |
| 05-08 | Тестирование микросхем ОЗУ | |
| 09-10 | Тестирование микросхем ППЗУ | |
| 11-12 | Тестирование интерфейсного канала | |
| 13 | Тест сторожа цикла | |
| 14 | Тестирование пульта настройки | |
| 15 | Тестирование лицевой панели БК-1 | |
| 16-17 | Тестирование цифро-дискретных преобразователей | |
| Установка | 00 | Обнуление или ввод стандартной конфигурации |
| приборных | 01 | Комплектность |
| параметров | 02 | Запрет изменения структуры и времен.диапазона |
| 03 | Время цикла | |
| 04-05 | Ресурс ОЗУ | |
| 06 | Вид библиотеки | |
| Системные | 00 | Номер в локальной сети |
| параметры | 01 | Режим работы интерфейса |
| Алгоритмы | - | Запись алгоритма, модификатора и масштаба времени в алогблоки |
| Конфигураци | - | Установка значений констант и коэффициентов настройки |
| Нач.условия | - | Установка начальных условий на входе агоблоков |
| ППЗУ | 00 | Запись из ОЗУ в ППЗУ |
| 01 | Восстановление информации из ППЗУ в ОЗУ | |
| 02 | Регенерация ПЗУ и ППЗУ |
Первое включение блока контроллера БК-1
1. Перед включением питания установить аккумуляторы в отсек батареи, Расположенный на задней панели блока контроллера. 2. Включить питание блока контроллера. К разьему , находящемуся на передней панели БК-1 подключить пульт настройки ПН-1. 3. Перевести контроллер в режим программирование. Для этого при мигающем светодиоде "Работа" нажать одновременно клавиши "вверх" и "вправо". Не позже чем через 3 с. должен загореться светодиод "Программ". Если при включении на пульте настройки будет гореть светодиод "Программ", то выполнять эту операцию не надо. 4. Нажатием клавиши "вправо" проверьте работу светодиодов в группе "Процедуры". При этом светодиоды должны поочередно загораться. 5. Протестируйте блок контроллера БК-1. Для этого установите на пульте настройки процедуру "Тест" и выполните все
тесты в соответствии с таблицей 1. (кроме тестов ЦАП и ЦДП).
4.1. Подготовка блока контроллера БК-1 к работе
Регулирующий микропроцессорный контроллер РЕМИКОНТ Р 130 поставляется заказчику в соответствии с документацией заказа, разработанной самим заказчиком. Поэтому перед вводом в эксплуатацию необходимо проверить комплектность поставки. Из всей совокупности поставляемых блоков и узлов программируемым является только блок контроллера БК-1. Остальные блоки являются либо аналогичными (БП-1,БУС-1,БУТ-1), либо дискретными (БУМ-1,БПР-1). Поэтому ввод в эксплуатацию блока БК-1 существенно отличается от ввода в эксплуатацию других блоков. При выполнении операций подготовки к работе изделия РЕМИКОНТ Р 130 предполагается , что все блоки комплекта установлены на соответствующих местах и выполнен электрический монтаж и соединения. Перед включением следует убедиться , что блок контроллера БК-1 соответствует проекту, а также убедиться в том, что установка диапазона входных сигналов клемно блочного соеденителя КБС-3 и выбор нормирующих резисторов РН-1 соответствует проекту автоматизации.
4.2.2. Тестирование.
4.2.2.1. Общие правила.
В процесе тестирования ("тест") можно проверить ПЗУ,ОЗУ,ППЗУ, интерфейсный канал, сторож цикла, пульт настройки,лицевую панель, и средства вывода информации - как аналоговые так и дискретные. При тестировании устанавливается код нужного теста, а при тестировании средств вывода - также контрольный сигнал. После нажатия клавиши "¦" тест запускается. Результат тестирования в большенстве тестов выдается на ЦИ, и путем сравнения контрольного сигнала, отсчитанного по ЦИ, и сигнала замеренного на выходе контроллера. Для проверки средств ввода информации специального теста не предусмотрено, однако средства ввода можно проверить в режи-
ме работы, для этого на вход контроллера подается (аналоговый или дискретный) контрольный сигнал, а на выходе соответствующих алгоритмов ввода в процедуре "вых" определяется цифровой эквивалент этого сигнала.Сравнивая поданый и отсчитаный на ЦИ сигналы, можно оценить исправность средств ввода информации. полный перечень тестов представлен в табл. 17.
Тесты
Таблица 17
Iтеста |
Наименование теста |
Результат тестирования |
| 00 | Комплексный (все микросхемы ПЗУ и ОЗУ) | 00 - тест прошел=\= 00 - номер непрошедшего теста |
| 01-04 | Микросхемы ПЗУ(соответственно 1-4) | 00 - тест прошел =\= 00 - номер непрошедшего теста |
| 05-08 | Микросхемы ОЗУ(соответственно 1-4) | 00 - тест прошел =\= 00 - номер непрошедшего теста |
| 09 | Стирание ППЗУ |
00 - ППЗУ стерто 09 - ППЗУ не стерто |
| 10 | Информация в ППЗУ |
00 – информация в ППЗУ сохранена 10 – информация в ППЗУ не сохранена 20 – информация в ППЗУ не записана |
| 11 | Обмен по интерфейсу |
00 - канал интерфейса исправен 11 - канал интерфейса не исправен |
| 12 | Частота обмена по интерфейсу | Если результат 00 через 48-58 S после запускa теста,то тест прошел иначе тест не прошел. Во время прохождения теста мигает точка на нижнем ЦИ |
| 13 | Сторож цикла | Если примерно через 1 S после запуска теста ЦИ будет погашен,то тест прошел.Если на нижнем ЦИ появится код 13 то тест не прошел. |
| 14 | Пульт настройки | Результат контролируется по индикаторам пульта настройки. |
| 15 | Лицевая панель | Результат контролируется по индикаторам лицевой панели |
| 16 | ЦАП,группа А | Результат контролируется на аналоговом выходе |
| 17 | ЦАП,группа Б | То же, что для группы А |
| 18 | ЦДП,группа А | Если в нагрузке нет короткого замыкания (К3), то результат контролируется на дискретном выходе;если имеется К3,то на ЦИ – код 75.01 |
| 19 | ЦДП,группа Б | То же, что для группы А, но при К3 код 75.02 |
Формат индикации информации на ЦИ при тестировыании памяти, интерфейса и сторожа цикла приведен на рис. 24а.
4.2.2.2. Тестирование памяти
Для проверки микросхем памяти предусмотрены тесты 00-10.
4.2.2.3. Тестирование интерфейса
Тест 11 проверяет исправность интерфейсного канала приемопередачи, Этот тест фиксирует неисправность в цепях передатчика приемника, а также в цепях разъема,связанных с интерфейсным
каналом. Тест 12 контролирует лишь частоту,с которой ведется передача. Этот тест выполняется независимо от исправности приемника или испрпавности в цепях разъема, связанных с интерфейсным каналом.
4.2.2.4. Тестирование сторожа цикла
При неисправности сторожа цикла контроллер продолжает пра вильно выполнять функции управления, но имеется опасность того, что при ряде неисправностей на аварийный дискретный выход не будет выдан сигнал отказа.
4.2.2.5. Тестирование пульта настройки
При тестировании пульта настройки непосредственно проверяются все индикаторы кроме ЛИ "Uпр" (этот индикатор контролирует напряжение подключаемого из вне источника при записи информации в ППЗУ или регенерации ПЗУ). Клавиши пульта настройки проверяются косвенно путем контроля выполнения штатных операций пульта - изменения процедуры(клавиши
"<--" , "-->"), изменения номера теста (клавиши " \/ "," /\ "), запуска теста(клавиша " ¦ " ), сброса результата тестирования ( клавиша " ¦ ").
Для тестирования индикаторов пульта настройки устанавливается номер теста 14 и нажимается клавиша " ¦ ". Все индикаторы (как ЛИ, так и ЦИ) на пульте гаснут и тест запускается. При
тестировании в последовательности указанной на рис. 25а, зажигается и гаснет каждый сигмент ЦИ (включая точку). Тнстируются все сигменты каждой цифры ( слева направо ) вернего, затем ни-
жнего ЦИ. После того как тестирование ЦИ заканчивается,начинается тест ЛИ "процедуры" (ЛИ последовательно зажигаются и гасятся справо налево ). Затем последовательно зажигаются и га-
сятся ЛИ "работа","прогр","отказ","откл.интф","ош","запр","откл". Пол оканчании тестирования на нижний ЦИ выдается код 00. Еслим этот код сбросить (нажать клавишу " ¦ "или" ¦ "), то
тест можно запустить вновь. При теститровании следует убедится что все сигменты ЦИ и
ЛИ зажигаются в нужной последовательности.
4.2.2.6. Тестирование лицевой панели
Для тестирования лицевой панели устанавливается номер теста 15 и нажимается клавиша " ¦ ",- на нижнем ЦИ пульта настройки появляется код 00. При тестировании лицевой панели вначале тестируется клавиатура ,затем индикаторы. Для тестирования клавиатуры по очереди нажимаются клавиши лицевой панели Для тестирования индикаторов лицевой панели регулирующей панели выполняется две операции. Первая операция запускается путем одновременного нажатия клавиш "????? При тестировании лицевой панели логической модели выполняется лишь первая операция.
При запуске второй операции последовательно слева направо зажигается 21 индикатор шкального индикатора " выход ", затем ЛИ " /\ "и" \/ ". После окончания каждой операции на нижний ЛИ выводитя код 00 и тестирование можно повторить или продолжить.
4.2.2.7. Тестирование аналогового ( ЦАП ) и дискретного
( ЦДП ) выхода.
При аналогового и дискретного выхода информация выводится на ЦИ в формате Контрольный сигнал записывается на выход только после нажатия клавиши " ¦ " и сохраняется на выходе до но вого нажатия клавиши " ¦ ". Вмд модуля УСО можно определить, зная модификацию контроллера
Первая (старшая) цифра модификации означает код модуля группы А, вторая (младшая) цифра - код модуля группы Б.
4.2.3. Приборные параметры .
В процедуре "приб"(приборные параметры) задаются и контролируются параметры, общие для всех алгоблоков контроллера. К этим параметрам относятся:
1) Номер стандартной конфигурации ( в часности, нулевой конфигурации, означающей полное обнуление).
2) Комплектность.
3) Запрет изменения параметров и диапазон временных параметров;
4) Время цикла .
5) Ресурс 1-й области ОЗУ.
6) Ресурс 2-й области ОЗУ.
7) состав и версия библиотеки алгоритмов.
При выполнении парных четырех операций приборные параметры могут как контролироваться, так и изменятся. Три последние операции являются только контрольными . При вводе люьбой стандартной конфигурации вся информация, ранее храняаяся в ОЗУ, аннулируется и в ОЗУ вводится новая информация , соответствующая выбраной стандартной конфигурации
Обнулить ОЗУ или ввести одну из стандартных конфигураций необходимо после первого включения контроллера. После ввода стандартной конфигурации она может быть изменена
или дополнена с помощью обычных процедур програмированния. При установке комплектности задается код , равный коду модификации контроллера. Этот код состоит из двух цифр. Первая
(старшая) цифра задает вид модуля УСО для входов группы А, вторая (младшая) - для группы Б. Код комплектности может изменятся в диапазоне 00-77.
В контроллере можно запретить изменение алгоритмической структуры (защита от несанкционированного поступа). Если уста новлен запрет, то разрешается изменять лишь параметры настройкии режим работы интерфейса. Изменение всех остальных параметров,
как для контроллера в целом, так и для отдельных алгоблоков, заблокировано.
В контроллере одновременно для всех его алгоблоков задается один из двух диапазонов: младший или старший. В младшем диапазоне в каждом алгоблоке индивидуально можно выбрать один из двух масштабов времени : секунды или минуты. В старшем диапазоне в каждом алгоблоке индивидуально можно выбрать один из двух масштабов времени: минуты или часы. Время цикла задается одинаовым для всех алгоблоков контроллера .Это время может устанавливаться в диапазоне 0,2-2 S с шагом 0,2 S. При изменении времени цикла остальные параметры неменяются.
Контроль ресурса ОЗУ позволяет оценить возможность дальнейшего наращивания алгоритмов управления . в ОЗУ имеется две области каждая со своим ресурсом. Ни один из этих ресурсов не может быть превышен. ПРи контроле библиотеки алгоритмов можно определить как номер
библиотеки, так и версию программного обеспечения. Номер библиотеки связан с моделью контроллера и определяется по табл. 20
Таблица 20
|
Библиотеки алгоритмов |
Модели контроллера |
Наименование модели |
| 01 | 01 | Автоматическое регулирование |
| 02 | 02 | Логико-программое управление |
| 03 | 03 | Непрерывно-дискретное управление |
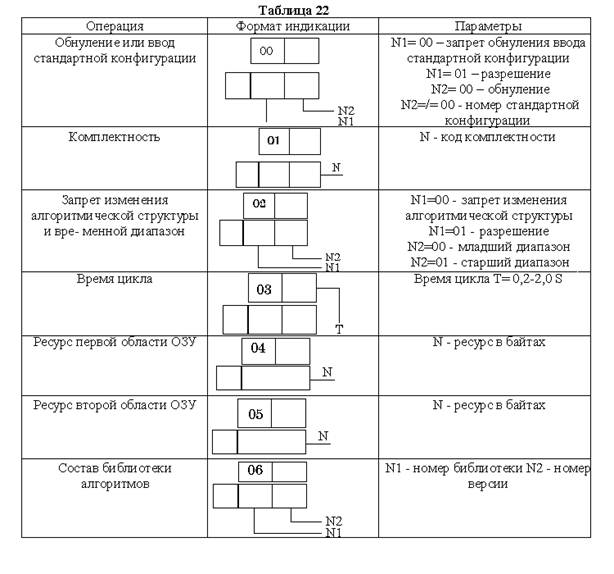
Версия является служебной информацией. Очередной номер версии присваевается разработчиком после какой либо коректировки программного обеспечения. В операциях с приборными параметрами вначале задается номер операции, после чего устанавливаются или контролируются сами приборные параметры. Номер операции задается в первом поле верхнего ЦИ в соответствии с табл.21
Таблица 21
|
операции |
Назначение операции |
| 00 | Обнуление или ввод одной из стандартных конфигураций |
| 01 | Комплектность |
| 02 |
Запрет изменения алгоритмической структиры и временной диапазон |
| 03 | Время цикла |
| 04 | Ресурс первой области ОЗУ |
| 05 | Ресурс второй области ОЗУ |
| 06 | Номер библиотеки алгоритмов и версия |
Приборные параметры
 |
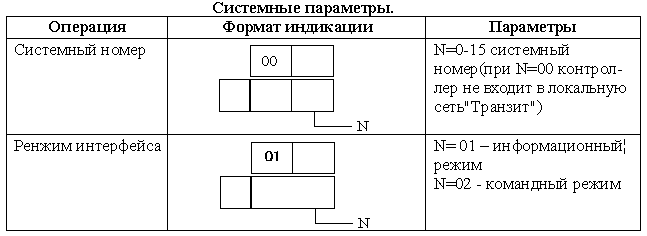
4.2.4. Системные параметры.
В процедуре "сист" (системные параметры) задаются параметры определяющие особенности взаимодействия контроллера с другими устройствами по интрфейсному каналу. К этим параметрам относятся:
1) Системный номер контроллера.
2) Режим интерффейсного канала.
Системный номер задаётся в том случае, когда контроллер работает в составе локальной сети "Транзит". Для каждого контроллера, входящего в сеть, должен быть задан свой индивидуальный
( не повторяющийся ) номер. Если контроллер не подключается к сети "Транзит", для него
устанавливается системный номер 00. Интерфейсный канал может работать в двух режимах:информационном и командном. В инфармационном режиме можно запрашивать значения всех параметров, прадусмотренных протоколом интерфейса, а именно:
оперативные параметры;
коэффициенты;
константы;
выходные сигналы алгоблоков;
ошибки;
системный номер.
Изменять ни один из этих параметров через интерфейс нельзя. В командном режиме через интерфейс можно запрашивать все параметры, которые разрешается запрашивать в информационном режиме и кроме того, можно изменять:
оперативные параметры;
коэфициенты.
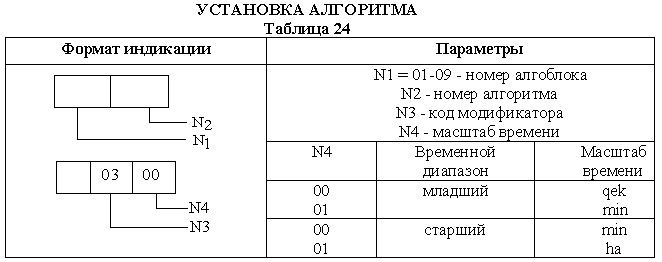
4.2.5. Алогоритмы
В процедуре "алг" (алгоритмы) происходит "заполнение" алгоблоков алгоритмами. В общем случае для каждого алгоблока задаются три параметра: сам алгоритм, его модификатор и масштаб времени.
В частном случае модифиатор и (или) масштаб времени могут отсутствовать. Тогда поля на ЦИ, в которые выводятся соответствуюшие параметры , автоматически пропускаются.
После обнуления становится доступным лишь первый алгоблок. После того, как в него будет введен какой-либо алгоритм(в том числе и "пустой" алгоритм с кодом 00),доступным становится второй алгоблок и.т.д.После того как будет заполнен алгоритмом какой-либо алгоблок , можно вернутся к алгоблоку с меньшим номером и изменить в нем алгоритм. Таким образом , после обнуления заполнять алгоблоки можно только подряд, начиная с первого алгоблока.Если какие-либо алгоблоки нужно зарезирвировать для последующего расширения алгоритмической структуры, в них следует внести алгоритм с кодом 00.
Из четырех процедур , связанных с программированием алгоблоков (см. п. 7.2.5.-7.2.8.), процедура вводов алгоритмов должна быть выполнена первойц. Если в каком либо алгоблоке вводится новый алгоритм,то все раннее установленные связи с ним анулируются а именно аннули-
руется конфигурация всех входов данного алгоблока и аннулируется конфигурация тех входов у тех алгоблоков , которые связаны с выходами данного алгоблока.
Указанные связи аннулируются не только при изменении номера алгоритма, но и при изменении значения модификатора или масштаба времени. Поэтому если был изменен хоть один из указанных параметров алгоритма все связи для его входов и выходов должны быть востановлены.
Правила установки алгоритма приведены в табл.24
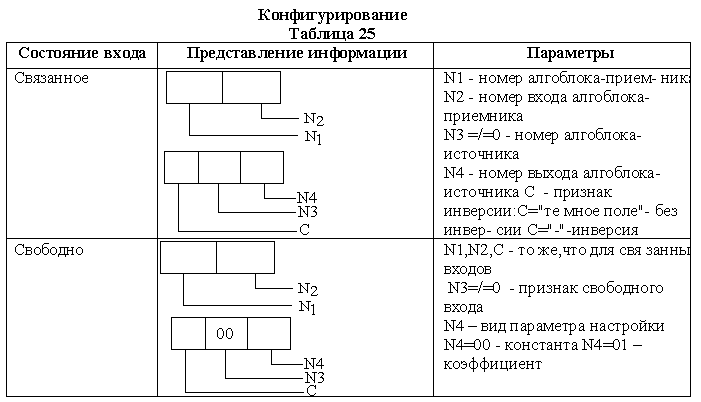
4.2.6. Конфигурация
В процедуре "конф" (конфигурирование) определяется состояние каждого входа алгоблоков. Каждый вход любого алгоблока может находится в одном из двух состояний:
1) связанном
2) свободном
Вход считается связанным, если он подключен к одному из выходов какого-либо алгоблока. В противном случае вход считается свободным.
На связанный вход сигнал поступает с выхода того алгоблока, с которым данный вход связан. На свободном входе сигнал может устанавливаться оператором вручную и в этом смысле сигнал на свободном входе выполняет роль параметра настройки.
Все параметры настройки делятся на две группы:
1) Константы
2) Коэффициенты
Константы устанавливаются оператором только в режиме программирования и не могут изменятся (но могут контролироваться) в режиме работы . Кэффициенты могут устанавливаться как врежиме программирования , так и в режиме работы.
При конфигурировании определяется лишь состояние входов алгоблоков приемника , а для связанных входов задается также номер алгоблока источника и номер его выхода.
Конкретные значения параметров настройки на свободных входах устанавливаются в процедуре "настройка". В исходном состоянии все входы алгоблоков являются свободными
и на них заданы константы, начальные значения которых зависят от вида алгоритма.
При конфигурации также определяется, поступает ли сигнал на данный вход прямо или инверсно. Для непрерывных сигналов (аналоговых, времменых, числовых) инверсия означает изменение знака; инверсия дискретных сигналов означает замену состояния сигнала на противоположное (нуля на единицу и наоборот).
Таким образом,в процедуре конфигурирования устанавливаются следующие параметры :
1) Определяется состояние входов: связанное или свободное,
2) Для связанных входов назначается номер алгоблока-исто-
чника и номер его выхода, с которым должен быть связан данный
вход.
3) Для свободных входов определяется, задается ли на них константа или коэффициент.
4) Для всех входов определяется поступает на них сигнал прямо
или инверсно.
Правила конфигурирования приведены в табл.25.
Из приведенных правил конфигурирования имеется два исключения
1) Входы некоторых алгоритмов не могут быть связанными, т.е.
их нельзя подключать к выходам алгоблоков.На этих входах можно задавать только константы. К этим алгоритмам относятся,например: ВИН, ИВА, ИВБ,(для последних двух алгоритмов указанное ограничение относится только ко входам, на которых задается номер контура).
При попытке связать входы этих алгоритмов с выходами алгоблоков вырабатывается признак ошибки с кодом 60 (см.табл.34)
2) Можно представить ситуацию, когда каскадно включенные алгоблоки образуют кольцевую конфигурацию. Если такая цепочка будет переведена в отключенный режим (например ,командой ручного управления),в ней возникает обратный счет и все алгоблоки перейдут в отключенное состояние.Это состояние сохранится и после того , как действие внешней команды ,инициирующей первоночальное отключение,прекратится. Таким образом ,однажды отключенное кольцо из каскадно включенных алгоблоков нельзя перевести во включенное cостояние.
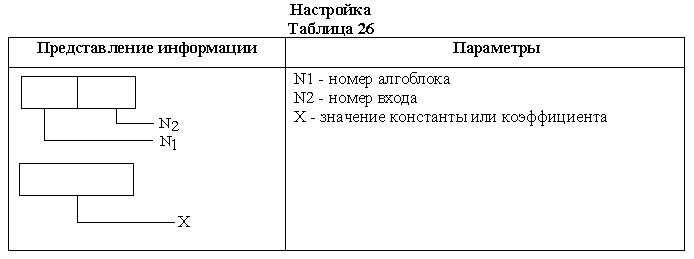
4.2.7. Настройка
В процедуре "настр"(настройка) устанавливаются значения параметров настройки, - как констант, так и коэфициентов. Эта процедура выполняется лишь для тех входов алгоблока, которые в процедуре конфигурирования были определены как свободные.
Значение константы сохраняется при переходе в режим работы и в этом режиме изменено быть не может. Значение коэффициента сохраняется при переходе в режим работы, но затем в этом режиме его можно изменять. Если параметры настройки не задаются, они принимают начальные значения, зависящие от вида алгоритма. Правила установки параметров настройки представлены в
Табл 26.
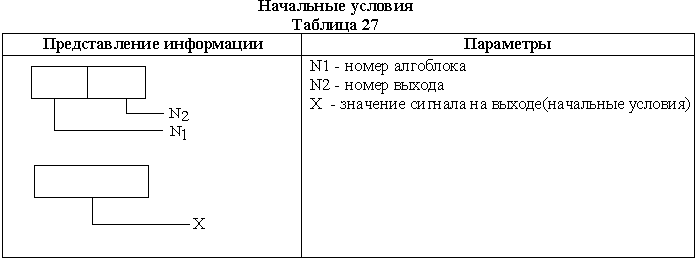
4.2.8. Начальные условия
В процедуре "н.усл." (начальные условия) устанавливаются значения сигналов на выходах алгоблоков, с которыми алгоблоки начнут работать при переходе в режим "работа".
Если начальные условия не задаются, то после первого включения контроллера они принимают значения, зависящие от вида алгоритма. В большинстве случаев это нулевые значения.
Правила установки начальных условий представлены в табл. 27.
4.2.9. Операции с памятью
В процедуре "ППЗУ" (операции с памятью) выполняются несколько операций, в которых участвуют ОЗУ, ППЗУ, ПЗУ. К этим операциям относятся:
1) Запись информации в ППЗУ.
2) Восстановление информации в ОЗУ.
3) Регенерация ПЗУ и ППЗУ.
Запись информации в ППЗУ производиться после того, как программа, находящаяся в ОЗУ, отлажена, и в неё не предполагается вносить изменения. Перед записью ППЗУ должно быть стерто.
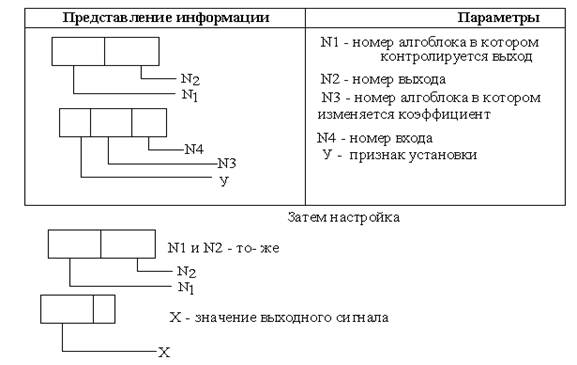
Калибровка
Как и при настройке изменяются значения коэффициентов (на свободных входах).Но при этом контролируется не значение коэффициента , а сигнал на любом выбранном выходе любого алгоблока. Колибровка позволяет скомпенсировать смещение нуля датчика и т.п. установить масштабный коэффициент . Вначале производится установка
Операции с памятью
Правила выполнения операций с памятью преедставлены в табл 28 При выполнении операций с памятью с помощью клавиши "¦" и клавишь "\/,/\" на ЦИ вызываются и устанавливаются нужные параметры. После того , как все параметры вызваны и установлены и вновь нажата клавиша "¦", операция начинает выполятся . Когда операция заканчивается , на ЦИ все поля , кроме первого, гаснут.
4.2.10. Контроль ошибок .
В режиме "програмирование" с помощью пульта настройки контролируются ошибочные действия оператора. При ошибочных действиях зажигается ЛИ "ош" и на ЦИ появляется код ошибки. ЛИ "ош" и код ошибки зажигаются , только пока подаётся недозволенная команда.
Когда нажатая клавиша, в ызвавшая ошибку , отпускается , ошибка пропадает.
4.3. Настройка и контроль
4.3.1. Процедуры настройки и контроля.
Все процедуры настройки и контроля выполняются в режиме "работа", т.е. когда контролер включен в контур управления.
Предусматривается семь процедур настройки и контроля.
1) Контроль ошибок.
2) Контроль приборных параметров .
3) Контроль системных параметров.
4) Контроль входных сигналов.
5) Контроль выходных сигналов.
6) Контроль констант и коэффициентов и установка коэффициентов
7) Калибровка.
Первые три процедуры относятся к контроллеру в целом,четыре остальных - к отдельным алгоблокам.
4.3.2. Контроль ошибок
В режиме "работа" средства самодиагностики контроллера фиксируют неисправности, связанные с отказоми аппаратуры , сбоем информации по интерфейсному каналу, нарушенгиями правил програмирования или выходом параметров за допустимые значения. Все эти неисправности делятся на две группы: отказы и ошибки. Процедура " ош " (ошибки ) позволяет определить вид неиспра-
вности, относящейся как к категории отказов, так и ошибок. Информация об ошибках высвечивается на ЦИ после нажатия клавиши "¦". На ЦИ индицируется как число ошибок , так и вид ошибки, которая во времени возникла последней.Для просмотра нажимаем клавишу "/\", пока клавиша нажата на ЦИ последовательно по кругу появляются коды ошибок в том порядке, как они возникали.Если клавишу отпустить , на ЦИ вновь выводится информация о последней ошибке.
4.3.3. Контроль приборных параметров
В процедуре " приб" (приборные параметры) можно контролировать приборные параметры. Из семи операций, выполняемых в режиме "програмирование" , в режиме " работа " выполняются в части контроллера.
ПРИЛОЖЕНИЯ
ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Габаритные размеры блока контроллера (80 х 160 х 365) мм
Параметры питания
- напряжение 24 В, 220 В, 240 В
- частота 50 Гц, 60 Гц
- потребляемая мощность 9 Вт, 15 В А
Время хранения информации при отключенном питании 168 час при
питании элементом РЦ63 40 час , при питании Д-0,06
1 диапазон (*) 0 ... 199,9 % / с,
0 ... 199,9 % /мин,
2 диапазон (*) 0 ... 199,9 % /мин,
0 ... 199,9 % /час,
10. Технические единицы, соответствующие 0 и 100 % аналогового сигнала -199,9 ... 0 ... 9999
ПРИМЕЧАНИЕ:(*) 1 и 2 диапазоны параметров, связанных с реальным (п. 3 и 9), задается при настройке всего контроллера в целом т.е. одновременно для всех его алгоблоков. Внутри диапазонов тот или иной масштаб времени выбирается при настройке индивидуально для
каждого алгоблока.
АНАЛОГОВЫЕ ВХОДЫ-ВЫХОДЫ Аналоговые входные сигналы унифицированные 0-5 мА Rвх=400 Ом 0-20 мА Rвх=100 Ом
4-20 мА Rвх=100 Ом 0-10 Вт Rвх=12 кОм
3. Измерительные преобразователи термо ХА, ХК, ПП, ПР, ВР, электрические в соответствии с ГОСТ 6651-84 Термометры сопротивления ТСП, ТСМ, по ГОСТ 6651-84
4. Характеристики аналового-цифровых преобразователей АЦП. Разрешающая способность 0,025% (12 разрядов) Максимальная погрешность после калибровки 0,3%
5. Погрешность при изменении температуры окружающей среды по 10 гр.С - максимальное значение 0,4% - среднее значение 0,2% 6. Максимальная погрешность АЦП при изменении напряжения питающей сети от +10 до -15% 0,1%
7. Гальваническая связь входов-выходов отсутствие гальванической связи между входами а также входами-выходами
8. Нелинейность характеристик усилителей для термопар (БУТ-10) и термометров сопротивления (БУС-10) - 0,1%
9. Максимальные погрешности усилителей для диапазона 10 мВ (БУТ-10) и /\ R=10 Ом (БУС-10): - при изменении температуры окружающей среды на 10 гр.С 0,25% - при изменении напряжения питающей сети от +10 до -15% 0,1%
10. Максимальная погрешность цифро-аналоговых преобразователей (ЦАП): - при изменении температуры окружающей среды на 10 гр.С 0,2% - при изменении напряжения питающей сети от +10 до -15% 0,1% 11.
Аналоговые входные сигналы унифицированные 0-5 мА Rн=2 кОм ; 0-20 мА Rн=0,5 кОм ; 4-20 мА Rн=0,5 кОм 12. Разрешающая способность ЦАП 0,05% (11 разрядов) 13. Максимальная
погрешность ЦАП после калибровки 0,5% гальваническая связь между выходами выходы связаны попарно причем каждая пара изолирована от остальных цепей.
ДИСКРЕТНЫЕ ВХОДЫ-ВЫХОДЫ. 14. Дискретрные выходные сигналы
уровень логического "0" 0-7 В уровень логической "1" 18-30 В входной ток 7 мА гальваническая развязка входы связаны в группы по 16 входов, каждая группа изолирована от цепей. 15. Дискретные (импульсные) выходные сигналы: а)транзисторный выход: максимальное напряжение коммутации 40 В максимальный ток нагрузки 0,8 А максимальный суммарный ток нагрузки
одновременно включенных выходов в пределах одной четверки (с 1 по 4, и с 5 до 8) 0,6 А максимальный суммарный ток нагрузки всех одновременно включенных выходов 2 А
Вид нагрузки активная, индуктивная
Защита от короткого замыкания в цепи нагрузки имеется Гальваническая развязка выходы связаны в группы по 16 выходов, каждая группа изолирована от других цепей б)сильно точный
релейный выход тип реле РПГ максимальное напряжение коммутации переменного тока (действующее значение) 220 В максимальный ток нагрузки каждого выхода 2 А гальваническая развязка выходы связаны попарно каждая пара изолирована от других цепей реализуемые законы регулирования ПИД, ПИ, ПД, П контролируемые параметры задание, вход, значение, рассогласование, выход, значение произвольного параметра и
Параметры ручного задатчика: клавиша - способ установки
больше-меньше - шаг дискретной установки 0,025 % -
время изменения от 0 до 100 % 22 с - вид
балансировки статическая и динамическая
Параметры программного задатчика:
- максимальное число программ для одного контура с условием, что общее число алгоблоков не более 99
- максимальное число участков в одной программе 47 - выполнение программы однократное, многократное , циклическое - максимальное число многократного повторения программы
8191 - команды управления программой выбор программы: пуск, стоп, сброс, переход к следующему участку - состояние программы пуск, стоп, сброс, конец программы - контролируемые параметры номер программы; номер повторения; номер участка; время, оставшееся до окончания участка; состояние программы: Управление выходом: - способ управления в ручном режиме клавиши больше-меньше - время изменения аналогового сигнала от минимального значения до максимального 22 с - разрешающая способность контроля положения исполнительного механизма по цифровому индикатору 0,125 % - то же по шкальному светодиодному индикатору 5 %
Параметры программы, ошибки контура.
Коды ошибок в подтверждении блока "шлюз"
| 02 | Отсутствует аллгоритм ЗДН или к нему не подключен вход 01 алгоритма ОКО |
| 03 | В модификаторе алгоритма ОКО не предусмотренно внешнее задание |
| 04 | В модификаторе алгоритма ЗДН не предусмотрен режим программного задания |
| 05 | Отсутствует алгоритм РУЧ или к нему не подключен вход 06 алгоритма ОКО |
| 06 | Отсутствует алгоритм ЗДН или к нему не подключен вход 11 алгоритма ОКО или модификатор ОКО не предусматривает каскадного режима |
| 07 | Ручное изменение задания запрещенно (статическая балансировка при отключенном контуре) |
| 08 | Состояние программы на "сброс" |
| 09 | Режим задания не программный |
| 0А | Режим управления не ручной |
| 0В | Указанный номер программы отсутствует |
| 0С | В модификаторе ОКО не предусмотрен дистанционный режим |
| 0D | На входе 01 алгоритма РУЧ присутствует команда блокировки автоматического режима |
| 0Е | При оперативном управлении: алгоритм РУЧ отключен алгоритмом,установленным по конфигурации после алгорит- ма РУЧ.При настройке: попытка изменить или проконтролировать параметр настройки на связанном входе алгоблока |
| 10 | Состояние программы не соответствует разрешенному для выполнения данной команды |
| 11 | Указанный номер этапа или шага отсутствует |
| 12 | При выполнении команды: новая команда получена, когда предыдущяя команта еще не была выполнена. При запросе: ни в один алгоблок не введен алгоритм |
| 13 | При оперативном управлении: попытка пуска несуществующего этапа или этапа, не связанного с соответстующим входом алгоритма ОКЛ. При настойке: попытка изменить параметр настройки, являющийся константой |
| 15 | В сообщении указан несуществующий вход алгоблока |
| 16 | В сообщении указан несуществующий выход алгоблока |
| 17 | В сообщении указан незадействованный номер алгоблока |
| 18 | Режим доступа в контроллере не командный (устанавливается в системных параметрах) |
| 1F. Nктр | Контроллер с номером Nктр, которому было посланно сообщение, в сети отсутствует или от нее отключен |
| 20.Nктр | Сообщение,связанное с контроллером Nктр, потеренно из-за того,что число необработанных сообщений больше 24 |
| 21 | Контроллер получил по сети ошибочное сообщение (длина сообщения превышает допустимую или ошибочно контрольное сообщение) |
| 22.Nктр или 22 | Абонент задал несуществующий тип сообщения |
| 23.Nктр или 23 | Абонент задал несуществующий вид сообщения |
| 24 | В сообщении указан несуществующий номер |
| 25 | В указанном контуре не запрограмирован алгоритм ОКО или ОКЛ |
| 27 | В сообщении указан неверный код команды |
| 28 | В сообщении указанно значение переменной, находящейся вне допустимых границ |
| 29.Nктр | Длина сообщения, полученная шлюзом от контроллера Nктр превышает дотустимую |
| 2А.Nктр | Абонент задал несуществующую категорию обмена (категория отличается от 00, 01 или 04) |
| 2В.00 | Шлюз имеет системный номер 00 и отключен от сети |
| 2С.00 | Шлюз из сети получил пакет с ошибочным форматом (например, ошибочной контрольной суммой) |
| 2С.Nктр | Сообщение, полученное шлюзом от абонента и адресованное контроллеру с номером Nктр имеет ошибочный формат (длина превышает допустимую или ошибочна контрольная сумма) |
| 2D.00 | Длина сообщения, полученная шлюзом от абонента превыша- ет допустимую |
РЕСУРСЫ ТРЕБУЕМЫЕ АЛЛГОРИТМОМ.
При програмировании контроллера следует помнить, что каждый алгоблок использует определенные ресурсы контроллера. К ним относятся время, затрачиваемое на обслуживание, и обьем занимаемой памяти. Время, затрачиваемое на обслуживание, зависит от вида алгоритма,
помещенного в алгоблок, и устанного модификатора. В общем случае время, затрачиваемое на обслуживание алгоритма можно определить из соотношения Та=Тб+m*Tm где Та-время,
затрачиваемое на обслуживание алгоритма Тб-базовое время, затрачиваемое на обслуживание алгоблока при значении модификатора m=0/ Тm-дополлнительное время, затрачиваемое на
обслуживание алгоритма при каждом приращении модификатора на еденицу.
Найденное время Та является определяющим при определении и установлении времени цикла Тц обработки информации.Общее время Таб должно быть меньше Тц. Общее время Таб, затрачиваемое на обслуживание всей алгоритмической структуры, запрограмированной
в контроллере определяется как N Таб=#Тai i=1 где N-число задействованных алгоблоков. Помимо времени обслуживания, алгоблоки используют часть обьема оперативной памяти (ОЗУ), которая
необходима для хранения алгоритма и обработки информации.Условно эти обдости обозначены ОЗУ1 и ОЗУ2. В облости ОЗУ1 хранятся значения параметров, которые не записываются в ППЗУ , а в ОЗУ2 параметры, записываеммые в ППЗУ. В общем случае обьем памяти требуемый
алгоблоку Па можно определить из соотношения Паj=Пбj=m*Пм где Паj- базовый обьем памяти, требуемый алгоблоку при модификаторе m=0. Пбj- дополнительный обьем памяти, требуемый при прирощении модификатора на еденицу. Общяя область ОЗУ1,требуемая для
задействованных алгоблоков N Паб1=#Пa1i i=1
Аналогично для ОЗУ2. N Паб2=#Пa2i i=1 Свободные облости ОЗУ1 и ОЗУ2 предстовляет собой не использованный ресурс. При програмировании контроллера необходимо следить за тем, чтобы обьем памяти занимаемый задействованными алгоритмами не превышал ресурсы ОЗУ1 и ОЗУ2. Общий ресурс памяти: ОЗУ1-2300 байт;ОЗУ2-2680 байт.
Общие параметры алгоритмов
Код |
Шифр | Время | Память байт | ||||
| Тб | Тм | ОЗУ1 | ОЗУ2 | ||||
| Пб | Пм | Пб | Пм | ||||
| 00 | - | 0.8 | - | 2 | - | 8 | - |
| 01 | ОКО | 1 | - | 28 | - | 28 | - |
| 02 | ОКЛ | 1 | - | 37 | - | 32 | 2 |
| 03 | ОКД | 1 | - | 40 | - | 42 | - |
| 04 | ДИК | 1 | 0.1 | 8 | - | 16 | 2 |
| 05 | ВИН | 1 | 0.2 | 2 | 2 | 10 | 2 |
| 06 | ИНВ | 1 | 0.2 | 11 | 2 | 8 | 2 |
| 07 | ВАА | 1 | 1 | 3 | 4 | 8 | 4 |
| 08 | ВАБ | 1 | 1 | 3 | 4 | 8 | 4 |
| 09 | ВДА | 1 | 0.2 | 2 | 2 | 8 | - |
| 10 | ВДБ | 1 | 0.2 | 2 | 2 | 8 | - |
| 11 | АВА | 1 | 1 | 2 | - | 8 | 6 |
| 12 | АВБ | 1 | 1 | 2 | - | 8 | 6 |
| 13 | ДВА | 1 | 0.2 | 2 | - | 8 | 2 |
| 14 | ДВБ | 1 | 0.2 | 2 | - | 8 | 2 |
| 15 | ИВА | 1 | 1 | 2 | 5 | 8 | 6 |
| 16 | ИВБ | 1 | 1 | 2 | 5 | 8 | 6 |
| 17 | АВР | 1 | - | 8 | - | 12 | - |
| 20 | РАН | 11 | - | 40 | - | 34 | - |
| 21 | РИН | 18 | - | 36 | - | 34 | - |
| 24 | ЗДН | 4.3 | 0.4 | 20 | 2 | 16 | 2 |
| 25 | ЗДЛ | 1.3 | - | 9 | - | 10 | - |
| 26 | РУЧ | 2.7 | - | 9 | - | 10 | - |
| 27 | ПРЗ | 4.8 | - | 27 | - | 18 | 4 |
| 28 | ИНЗ | 2.4 | - | 7 | - | 18 | - |
| 29 | ПОК | 2.1 | 0.8 | 6 | - | 8 | 6 |
| 30 | АНР | 4.1 | - | 6 | - | 18 | 6 |
| 33 | ИНТ | 2.7 | - | 11 | - | 18 | - |
| 34 | ДИФ | 2.7 | - | 9 | - | 16 | - |
| 35 | ФИЛ | 2.7 | - | 9 | - | 12 | - |
| 36 | ФИН | 5.6 | - | 9 | - | 12 | - |
| 37 | ДИП | 3.2 | - | 9 | - | 12 | - |
| 38 | ОГС | 3.2 | - | 12 | - | 12 | - |
| 39 | ЗАП | 2.7 | 0.2 | 11 | 2 | 18 | - |
| 42 | СУМ | 3.2 | 0.2 | 4 | - | 10 | 3 |
| 43 | СМА | 1.6 | 1.1 | 4 | - | 10 | 4 |
| 44 | УМО | 4 | - | 4 | - | 14 | - |
| 45 | КОР | 1.6 | - | 4 | - | 10 | - |
| 46 | МОД | 0.8 | 0.5 | 2 | 2 | 8 | 2 |
| 47 | КУС | 1.3 | 0.3 | 6 | - | 10 | 4 |
| 48 | ОГР | 2.4 | - | 9 | - | 14 | - |
| 49 | СКС | 2.7 | 0.6 | 13 | 2 | 18 | - |
| 50 | ДИС | 3.2 | - | 19 | - | 20 | - |
| 51 | МИН | 0.8 | 0.3 | 6 | - | 8 | 2 |
| 52 | МКС | 0.8 | 0.4 | 6 | - | 8 | 2 |
| 53 | СИТ | 4.8 | - | 10 | - | 16 | - |
| 54 | ЭКС | 5.6 | - | 23 | - | 18 | - |
| 55 | МСШ | 0.8 | 1.1 | 2 | 2 | 8 | 4 |
| 57 | ПНР | 1.6 | 0.5 | 6 | 0 | 8 | 4 |
| 58 | ПСН | 1.6 | 0.2 | 4 | 0 | 10 | 2 |
| 59 | ПОР | 1.6 | 1.1 | 4 | 2 | 8 | 10 |
| 60 | НОР | 1.6 | 1.7 | 4 | 4 | 8 | 10 |
| 61 | ИМП | 2.4 | - | 14 | - | 12 | - |
| 62 | ЗАИ | 3.2 | - | 12 | - | 18 | - |
| 63 | ЗАЗ | 3.2 | - | 8 | - | 14 | - |
| 64 | САЗ | 1.3 | 0.1 | 4 | 2 | 10 | 2 |
| 65 | ЗПМ | 1.3 | 0.1 | 5 | 2 | 10 | 2 |
| 66 | БОС | 1.6 | - | 4 | - | 14 | - |
| 67 | ЗОТ | 1.6 | - | 6 | - | 10 | - |
| 70 | ЛОИ | 1.3 | 0.7 | 2 | 2 | 8 | 4 |
| 71 | МНИ | 1.3 | 0.1 | 4 | - | 8 | 2 |
| 72 | ИЛИ | 1.3 | 0.7 | 2 | 2 | 8 | 4 |
| 73 | МИЛ | 1.3 | 0.3 | 4 | - | 8 | 2 |
| 74 | ИИЛ | 1.3 | 0.7 | 2 | 2 | 8 | 4 |
| 75 | МАЖ | 1.3 | - | 8 | - | 14 | - |
| 76 | ТРИ | 1.3 | 0.6 | 2 | 2 | 8 | 4 |
| 77 | РЕУ | 1.3 | 0.1 | 4 | 2 | 10 | 2 |
| 78 | РЕФ | 1.3 | 0.1 | 5 | 2 | 10 | 2 |
| 79 | ВЫФ | 1.3 | - | 5 | - | 10 | - |
| 80 | ЭТП | 1.3 | 0.3 | 9 | 10 | 8 | 6 |
| 81 | ТМП | 2 | 0.6 | 5 | 2 | 12 | 2 |
| 82 | СЧТ | 2.4 | 0.6 | 6 | 2 | 18 | 2 |
| 83 | ВДВ | 2.4 | - | 9 | - | 4 | - |
| 84 | НУВ | 2.4 | - | 9 | - | 16 | - |
| 85 | ПЧИ | 1.6 | 0.1 | 4 | - | 10 | 2 |
| 86 | СЧИ | 1.6 | 0.6 | 4 | 2 | 13 | 4 |
| 87 | ВЧИ | 1.6 | 0.8 | 4 | 2 | 13 | 6 |
| 88 | УДП | 2.4 | 0.4 | 12 | - | 8 | 4 |
| 89 | УТП | 4.1 | 0.6 | 18 | - | 8 | 6 |
| 90 | ШИФ | 2.7 | 0.1 | 4 | - | 8 | 2 |
| 91 | ДЕШ | 2.3 | 0.2 | 2 | 2 | 10 | - |
| 92 | ЛОК | 2.3 | 0.2 | 6 | - | 8 | 2 |
| 94 | ШАП | 1.3 | 0.3 | 9 | 3 | 8 | 6 |
| 95 | ГРА | 1.3 | 0.9 | 6 | 3 | 8 | 6 |
| 96 | ГВД | 1.3 | 0.4 | 6 | 2 | 8 | 2 |
| 97 | ГДВ | 1.3 | 0.4 | 6 | 2 | 8 | 2 |
| 98 | ГРУ | 1.3 | 0.9 | 6 | 3 | 8 | 6 |
| 99 | ГРК | 1.3 | 0.2 | 4 | 1 | 8 | 8 |
Процедуры обслуживания алгоблоков.
Обслуживание алгоблоков в блоке контроллера ведется циклически с постоянным временни цикла, значение которого устанавливается при програмировании приборных пораметров.Цикл обслуживания начинается с `алгоблока 01 и продолжеется в порядке возрастания номеров.По
истечению времени цикла, обслуживание начинается с алгоблока 01. Время цикла может изменятся в пределах от 0.2 до 2 с. с шагом 0.2 с.С учетом затраченного времени на обслуживание всех алгоблоков Таб время цикла Тц должно превышать эти затраты. Излишки времени т.е. разность Тц-Таб используется для выполнения процедур самодиогностики. Если в оставшееся в цикле время нет возможности полностью выполнить диогностику , то эта процедура растягивается на несколько циклов.Это может привести к несвоевременному выявлению ошибок. Кроме того во время цикла обслуживание происходит передача и прием информации по интерфейсному каналу. Таким образом Тц>Таб=Тин Если это соотношения не выполняются, необходимо увеличить время цикла Тц или упрстить решающюю задачу.При выборе времени цикла следует оставлять резерв, не меньше 0.04-0.08с.
Неисправности типа "отказ"
|
код отказа |
причина отказа |
методы устранения отказа |
| 01 |
Отказ ПЗУ |
Выполнить тест ПЗУ, определить не исправную микросхему и заменить ее; при отсутствии микросхем ПЗУ с "защитой" программой заменить модуль процессора. |
| 02 | Отказ рабочей области ОЗУ | Выполнить тест ПЗУ, определить не исправную микросхему и заменить ее; при отсутствии микросхем ОЗУ заменить модуль процессора. |
| 03 | Сбой алгоретмической структуры при невоз- можности ее восста новления | Заново ввести алгоритмы, конфигура- цию и коэффициенты; при повторении отказа выполнить процедуры анало- гичные коду 02 |
| 04.№АБ | Сбой конфигурации параметров настройки при невозможности автоматического их восстановления | Заново ввести алгоритмы, конфигу- рацию и параметры настройки в алго- блоке №АБ при повторении отказа вы- полнить процедуры, аналогичные коду 02 |
| 05.№АБ | Сбой ячеек накопления и выхода при не- возможности их авто- матичесского восста- новления | Войти в процедуру "начальные усло- вия" и установить требуемые значения выходов; при повторении отказа выполнить процедуры аналогичные коду 02 |
| 06.№АБ | Недопустимое значе- ние константы на входе алгоблока | Перейти в режим программирования и проверить значения констант на входе алгоблока с номером №АБ. В частности проверить не задан ли в алгоритме интерфейсного ввода номер источника №ист>№15 или №ист=№сист, где "сист- системный номер данного контроллера. |
| 40 | Информационный отказ.Проверить сигнал на входе "отказ" алгоритма АВР и выяснить причину по которой этот сигнал принял недо- пустимое состояние. |
Неисправности типа "ошибка"
|
код ошибки |
причина ошибки |
методы устранения ошибки |
| 20 | Отказ ППЗУ | Стереть ППЗУ и вновь записать в него информацию; при повторении ошибки заменить микросхему ППЗУ |
| 21.№АБ | Отказ копии ОЗУ алгоблока №АБ | Выполнить тест ОЗУ, определить не- исправную микросхему и заменить ее |
| 22 | В результате сбоя приборных или систе- мных параметров вы- полнено установка их начальных значений из ППЗУ | В процедуре "сисмемные параметры" установить требуемый режим интер фейса |
| 23.N АБ | В результате сбоя коэффициентов выпол- нено восстановление их начальных значе- ний из ППЗУ | Установить требуемое значение тех коэффициентов алгоблока №АБ, которые изменялись после записи в ППЗУ |
| 24 | Время обслуживания алгоритмов больше установленного вре- мени цикла | Увеличить время цикла или уменьшить объем решаемой задачи |
| 25 | Напряжение батареи ниже допустимого | Заменить батарею |
| 25.№ГР | Короткое замыкание на одном из дискрет- ных или импульсных выходов контроллера | Прозвонить цепи нагрузки дискретных и импульсных выходов группы А или устранить короткое замыкание |
| 30.№ГР | Установлен алгоритм ввода при коде комплектности, не предусматривающем аналоговых входов | Проверить соответствие кода комплектности реальному составу модулей УСО и либо установить правельный код комплектности, либо найти алгоблок с алгоритмом аналогового ввода группы А или В и исключить этот алгоритм |
| 31.№ГР | То же , что при коде30, но для дискрет- ных входов, либо мо- дификатор алгоритма дискретного ввода больше числа диск- ретных входов,пре- дусмотренных кодом комплектности | То же , что при коде 30, либо привести в соответствие модификатор алгоритма дискретгого ввода группы А или Б .№ГР=02 коду комплектности |
| 32.№ГР | То же , что при коде30,но для алгоритмов аналогового вывода | То же , что при коде 30,но для алгоритмов аналогового вывода |
| 33.№ГР | То же , что при коде31, но для дискрет- ного и импульсного вывода | То же , что при коде 31, но для дискретного и импульсного вывода |
| 34 | Неисправность интер- фейсного канала | Перейти в режим программирования и выполнить тесты интерфейса |
| 41 | Информационное отключение интерфей- сов | Проконтролировать сигналы,формирующие сигнал на входе "откл.интф" алгоритма аварийного вывода АВР, и выяснить причину выхода этих сигна- лов за допустимые значения |
| 42 | Разрыв сети"Транзит" | Ошибки индицируется только в контроллере, у которого разорванна цепь приемника. Прозвонить цепь приемника и линии связи, соеденяющие приемник данного контроллера с передатчиком предыдущего контроллера и устронить обрыв |
2. Алгоритмы лицевой панели.
2.1. ОКО(01)-Оперативный контроль регулирования.
Назначение.
Алгоритм применяется в том случае, если оперативное управление контуром регулирования должно вестись с помощью лицевой панели контроллера. Каждый контур (от 1 до 4) обслуживается своим алгоритмом ОКО. Алгоритм позволяет с помощью клавиш лицевой панели изменять режим управления, режим задания, управлять программным задатчиком, изменять выходной сигнал регулятора (в режиме ручного управления), изменять сигнал задания (в режиме ручного задат
чика), а также контролировать сигналы задания и рассогласования, входной и выходной сигналы, параметры прграммы (при программном регулировании) и т.п. Как правило,алгоритм ОКО ,применяется в сочетании с алгоритмами ЗДН, ЗДЛ, РУЧ,РАН,РИМ.
Оисание алгоритма.
Алгоритм ОКО (рис.2) помещается только в алгоблоки с номерами от 1 до 4. Номер алгоблока, в который помещен алгоритм ОКО, определяет номер контура, обслуживаемого данным алгоритмом ОКО. При одном контуре алгоритм ОКО помещается в первый алгоблок, при двух контурах- в первый и второй алгоблоки и т.д.
Алгоритм имеет модификатор 0<=m=<15. Модификатор задает вид и спецефичес
кие параметры регулятора, а именно:
а) является регулятор обычным каскадным;
б) имеет регулятор аналоговый или импульсный выход;
в) предусматривается ли переход на внешнее задание;
г) предусматривается ли режим дистанционного управления;
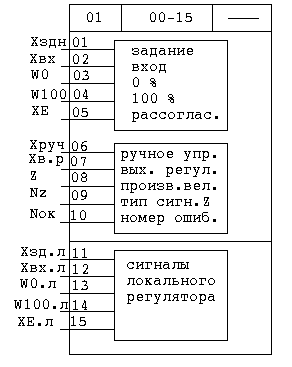 |
Nz |
Тип сигнала |
|
0 1 2 3 4 5 6 7 8 9 |
Дискретный Время,младший масштаб Время,старший масштаб Скорость,младший масштаб Скорость,старший масштаб Время импульса Масштабный коэффициент Kоэфф.пропорциональности Аналоговый Числовой |
|
Вид регулятора |
Мод |
РЕЖИМЫ "ВНШ" |
ЗАДАНИЯ"ДСТ" |
| обычный аналоговый |
00 01 02 03 |
- - + + |
- + - + |
| Обычны импульсный |
04 05 06 07 |
- - + + |
- + - + |
| каскадный аналоговый |
08 09 10 11 |
- - + + |
- + - + |
| каскадный импульсный |
12 13 14 15 |
- - + + |
- + - + |
ОКЛ (02) - Оперативный контроль логической программы.
2.2. ОКЛ(02)-Оперативный контроль логической программы.
Назначение. Алгоритм ОКЛ применяется в составе модели Р-130, ориентировочнной на решение задач логического шагового управления. Алгоритм применяется в сочетании с алгоритмом этапа ЭТП, координирует работу алгоритмов ЭТП и позволяет выводить на индикаторы лицевой панели оперативную информацию о ходе выполнения логической программы. В одном контроле можно реализовать 4 независимых программы. Для контроля каждой программы используется отдельный алгоритм ОКЛ. Описание алгоритма. Номер программы,с которой связан алгоритм ОКЛ, равен номеру алгоблока,в котором помещен данный алгоритм ОКЛ. Так как в контроллере можно реализовать до 4 программ, алгоритм ОКЛ помещается только в первые 4 алгоблока. Все операции, выполняемые алгоритмом ОКЛ, относятся к программе, с которой связан данный алгоритм. Алгоритм имеет 3 секции (рис.3).Первая секция управляет состоянием прграммы, вторая организует контроль сигналов по цифровому индикатору, третья координирует работу алго-
ритмом этапа ЭТП. Управление состоянием программы может выполняться как с помощью клавиш лицевой панели контроллера, так и с помощью дискретных команд пуска, останова и сброса, поступающих на входы соответственно Сп,Сст и Ссбр. Эти команды действуют по пе-
реднему фронту,причем если управление ведется и от клавиш лицевой панели, и от входов алгоритма, то выполняется последняя поступившая команда.
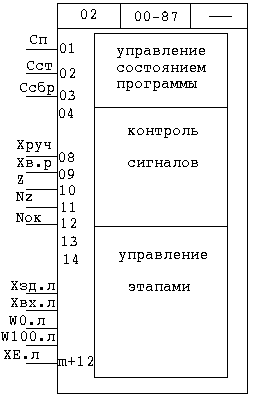
Nz |
Тип сигнала |
|
0 1 2 3 4 5 6 7 8 9 |
Дискретный Время,младший масштаб Время,старший масштаб Скорость,младший масштаб Скорость,старший масштаб Время импульса Масштабный коэффициент Kоэфф.пропорциональности Аналоговый Числовой |
3.3 ВАА(07)-Ввод аналоговый группы А и
ВАБ(08)-Ввод аналоговый группы В.
Назначение.
Алгоритм применяется для связи функциональных алгоритмов с аппаратными средствами аналогово входа (с АЦП). Для связи с аналоговыми входами группы А и Б используются соответственно алгоритмы ВАА и ВАБ. Каждый алгоритм обслуживает до 8 аналоговых входов.
Помимо связи с АЦП алгоритмы ВАА и ВАБ позволяют корректировать диапазон входного аналогово сигнала в двух точках, соответствующих 0 и 100% диапозона.
Описание алгоритма.
Алгоритм содержит несколько идентичных независимых каналов. Число каналов 0<=M<=8 и задается модификатором (рис.7). Каждый канал связан с соответствующим (по номеру) анлоговым входом контроллера.
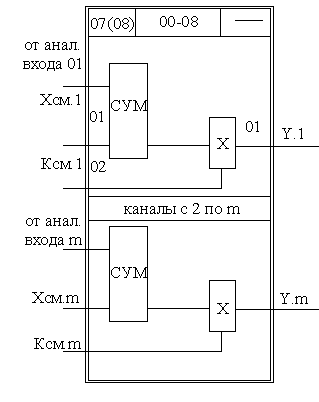
3.4. ВДА(09)-Ввод дискретный группы А и
ВДБ(10)-Ввод дискретный группы .
Назначение.
Алгоритм применяется для связи функциональнных алгоритмов с аппаратными средствами дискретного ввода (с ДЦП). Для связи с входами группы А и Б используются соответственно алгоритмы ВДА и ВДБ. Каждый алгоритм обслуживает до 16 дискретных входов.
Описание алгоритма.
Алгоритм содержит несколько идентичных независимых каналов. число которых 0<=M<=16 и задается модификаторо (рис.8). Если напряжение на i-м дискретном входе контроллера равно 0,
сигнал на i-м выходе алгоритма ВДА(ВДБ) равен Di=0. Если на i-й дискретный вход контроллера подано напряжение 24В, сигнал на i-м выходе алгоритма ВДА(ВДБ) принимает значение Di=1.
Выход алгоритма ВДА(ВДБ).
Таблица 11.1
Выходы |
Назначение |
||
| N | Обозн. | Вид | |
|
01 02 M м |
D1 D2 M Dm |
Выходы |
Выход канала 1 Выход канала 2 Выход канала м |
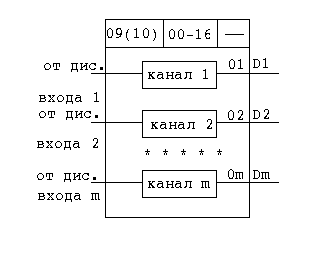
3.5 АВА(11)-Аналоговый вывод группы А и
АВБ(12)-Аналоговый вывод группы Б.
Назначение.
Алгоритм применяется для связи функциональных алгоритмов с аппаратными средствами аналогового вывода (с ЦАП). Для связи с аналоговыми выходами группы А и Б используется соответственно алгоритмы АВА и АВБ. Каждый алгоритм обслуживает до 2 аналоговых
выходов. Помимо связи с ЦАП алгоритмы АВА и АВБ позволяют корректировать
диаппазон выходного аналогового сигнала в двух точках,соответствующих 0 и 100% диапазона.
Описание алгоритма.
Алгоритм содержит до 2 идентичных независимых каналов. Число этих каналов 0<=M=<2 задается модификатором (рис.9). Каждый канал связан с соответствующим (по номеру) аналоговым
выходом контроллера. Эта связь образуется "автоматически",как только алгоритм АВА(АВБ) вводится в один из алгоблока контроллера.
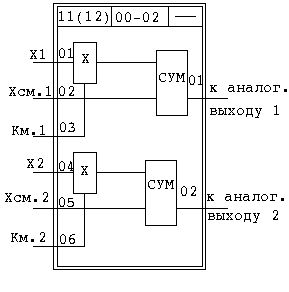
3.6. ДВА(13)-Дискретный вывод группы А и
ДВВ(14)-Дискретный вывод группы Б
Назначение.
Алгоритм прменяется для связи функциональных алгоритмов с аппаратными средствами дискретного вывода (с ЦДП). Для связи с выходами А и Б используется соответственно алгоритмы ДАА(ДВБ). Каждый алгоритм обслуживает до 16 дискретных выходов. Описание алгоритма.
Алгоритм содержит несколько идентичных независимых каналов, число которых 0<=M=<16 и задается модификатором (рис.10). Если на i-й вход алгоритма поступает сигнал Di=0, контакты
i-го дискретного выхода разомкнуты. Если Di=1, контакты i-го дискретного выхода замыкаются.
Входы алгоритма ДВА(ДВБ)
Таблица 13.
| Выходы | Назначение | ||
| N | Обозн. | Вид | |
|
01 02 M м |
C1 C2 M Cm |
Выходы |
Выход канала 1 Выход канала 2 Выход канала м |
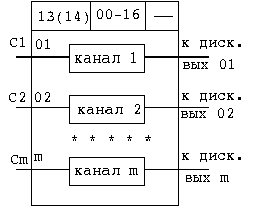 |
3.7. ИВА(15)-Импульсный вывод группы А и
ИВБ(16)-Импульсный вывод группы Б.
Назначение.
Алгоритм применяется в тех случаях, когда контроллер должен управлять исполнительным механизмом постоянной скорости. Алгоритм преобразует сигнал, сформированный алгоблоками контроллера ( в частности, алгоритмом импульсного регулирования),в последовательности
импульсов переменной скважности. Алгоритм выдает последовательнось указанных импульсов на средства дискретного выхода контроллера. Для связи с выходами группы А и Б используются алгоритмы соответственно ИВА и ИВБ.
Описание алгоритма.
Алгоритм содержит несколько (до 4) каналов связи с выходами контроллера. Число этих каналов 0<=M=<4 задается модификатором (рис.11). Если импульсный выход используется как в группе А, так и в группе Б, то общее число импульсных выходов (т.е. сумма модификаторов алгоритмов ИВА и ИВБ) не может быть больше 4. Каждый канал алгоритма ИВА(ИВБ) содержит широтно-импульсивный модулятор (ШИМ),преобразующий входной сигнал Х в последовательность
импульсов со скважностью Q, пропорциональной входному сигналу : Q=/Х/ / 100. При /Х/ >=100% скважность Q=1. Если Х=0, импульсы формируются в выходной цепи "больше",если Х=0, то в цепи "меньше".
При Х=0 выходной сигнал -- равен 0.
Параметр Т задает минимальную длительность выходных импульсов. Этот параметр устанавливается в диапазоне 0,12<=T=<3,84 S. Параметр N определяется к какому контуру регулирования относится данный канал алгоритма ИВА(ИВБ). Задание этого параметра необходимо
лишь в том случае, когда требуется, чтобы синхронно с формированием выходных импульсов на лицевой панели контроллера зажигались ламповые индикаторы " "," "("больше","меньше"). Напрмер, если установлен параметр N1=1, то при работе ШИМ1 на лицевой панели будут зажигаться индикаторы при вызове 1-го контура. Если задано N<1, то индикаторы
зажигаться не будут, какой бы контур ни был вызван на лицевую панель. Если для нескольких ШИМ задан одинаковый номер N, то действует следующая система приоритетов: ШИМ группы Б приоритетны над ШИМ группы А; в пределах одной группы приоритетны ШИМ со старшими номерами.
Входы алгоритма ИВА (ИВБ).
Таблица 14.
Выходы |
Назначение |
||
N |
Обозн |
Вид |
|
|
01 02 03 04 05 06 07 08 09 10 11 12 |
X1 T1 N1 X2 T2 N2 X3 T3 N3 X4 T4 N4 |
Выходы |
Сигнал 1-го выхода Длительность импульса 1-го выхода Номер, контура, с которым связан 1-ый выход То же, что Х1, но для 2-го выхода То же, что Т1, но для 2-го выхода То же, что N1, но для 2-го выхода То же, что Х1, но для 3-го выхода То же, что Т1, но для 3-го выхода То же, что N1, но для 3-го выхода То же, что Х1, но для 4-го выхода То же, что Т1, но для 4-го выхода То же, что N1, но для 4-го выхода |
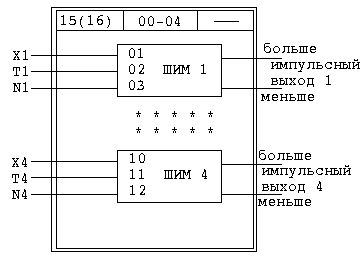 |
3.8. АВР(17)-Аварийный вывод.
Назначение.
Алгоритм позволяет алгоритмическими средствами сформировать два независимых сигнала на аварийных выходах контроллера: на выходе "отказ" и на выходе "отключение интерфейса". Алгоритм применяется в тех случаях, когда какая-либо ситуация ( т.е появление каких-либо сигналов,поступивших из вне или сформированных внутриконтроллера) должна рассматриваться либо как аварийная, либо как сигнал о том, что следует заблокировать связь контроллера
с абонентами по интерфейсному каналу. Алгоритм позволяет также выявить наличие короткого замыкания на дискретных или импульсных выходах контроллера.
Описание алгоритма.
Если на вход отказа приходит сигнал Сотк.=1, на аварийном выходе контроллера формируется сигнал отказа, сформированный алгоритмом, по схеме ИЛИ оъединяется с сигналом отказа, сформированным средствами самодиагностики контроллера. При наличии сигнала отказа
с помощью аппаратных средств формируется также сигнал "отключение интерфейса", т.е. при отказе связь контроллера по интерфейсному сигналу блокируется(рис.12).
Если на вход отключения интерфейса приходит сигнал Синт.=1,
на аварийном выходе контроллера формируется сигнал отключения интерфейса. Этот сигнал, сформированный алгоритмом, по схеме ИЛИ объединяется с сигналом отключения интерфейса, сформированным средствами самодиагностики контроллера. Алгоритм имеет два дискретных выхода,свидетельствуючих о том, имеется ли короткое замыкание на дискретных или импульсных выходах контроллера. Если хотя бы на одном дискретном или импульсном выходе
в группе А возникло короткое замыкание, сигнал Dкз,а=1, в противном случае Dкз,а=0. Аналогично выход Dкз,б сигнализирует окоротком замыкании в группе Б.
Входы-выходы алгоритма АВР.
Входы-выходы |
Назначение |
||
| N | Обозн. | Вид | |
| 0102 |
Сотк. Синт. |
Входы |
Команда "отказ" Команда "отключение интерфейса" |
|
01 02 |
Dк3,а Dк3,б |
Выходы |
Признак короткого замыкания на дискретных (импульсных) выходах группы А. То же для группы Б. |
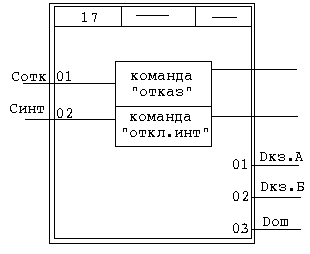
ТРИ-RS-Триггер
Алгоритм содержит несколько (до 20) независимых R,S-триггеров и применяется для запоминания дискретных сигналов. Алгоритм содержит 0£м£20 независимых ячеек, каждая из которых представляет собой RS – триггер. Число м определяется модификатором. При м=0 алгоритм является “пустым”. Работа каждой ячейки алгоритма определяется таблицей 1, а входы-выходы алгоритма показаны в таблице 2.
| Сs | CR | D |
|
0 1 0 1 |
0 0 1 1 |
Di-1 1 0 0 |
Таблица 1.
(Di-1 – предыдущее значение выхода).
Входы – Выходы |
Назначение | ||
| № | Обозн | Вид | |
|
01 02 M 2м-1 2м |
Cs,1 CR,1 M Cs,m CR,m |
Входы |
Вход установки 1-й я-ч. Вход сброса 1-й ячейки. M Вх. Ус-ки м-ой яч. Вх. Сброса м-ой яч. |
|
01 M м |
D1 M Dm |
Входы |
Выход 1-й ячейки M Выход m-ой ячейки |
Таблица 2.
Каждые ячейки имеют два дискретных входа и один дискретный выход.
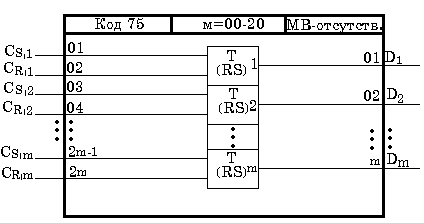 |
Функциональная схема алгоритма “Триггер ТРИ”
TMP – Таймер
Алгоритм используется для задания выдержек времени. Алгоритм содержит несколько (до 20) таймеров, объединённых общими командами “стоп” и “сброс”. В каждом таймере индивидуально настраивается время сбрасывания таймера. Алгоритм содержит одно звено таймера и м нуль – органов, где 0£м£20 и задаётся модификатором.
Входы – Выходы |
Назначение | ||
| № | Обозн. | Вид | |
|
01 02 03 M м+2 |
Сст Ссбр Т1 M Тм |
Входы |
Команда “стоп” К-да “сброс” Время срабатывания 1-го нуля органа Время срабатывания м-го нуля органа |
|
01 02 M м+1 |
ТD1 M Dm |
Выходы |
Текущее времяВыход 1-го нуль-органа Выход м-го нуль-органа |
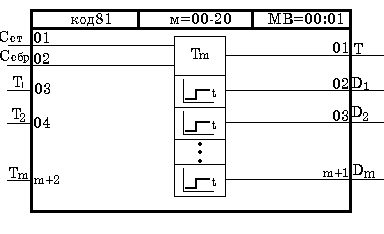 |
Функциональная схема алгоритма “Таймер ТМР”
СЧТ – Счётчик
Алгоритм представляет собой реверсивный счётчик и используется для подсчёта числа дискретных событий, а также для сравнения подсчитанного числа с заданными числами с помощью числовых
нуль-органов. Один алгоритм может содержать до 20 таких нуль-органов. Работа счётчика разрешается, если на входах Сст и Ссбр отсутствуют сигналы “стоп” и “сброс”.
Входы – выходы алгоритма СЧТ.
| Входы – Выходы | Назначение | ||
| № | Обозн. | Вид | |
|
01 02 03 04 05 06 |
Сб Сн СстСсбр N0 N1 M |
Входы |
К-да на увеличение числа Команда на уменьшение числа К-да “стоп” К-да “сброс” Наминальное значение числа Пороговое значение 1-го нуль органа |
|
01 02 |
N D1 |
Выходы |
Число, подсчитанное счётчиком Выход 1-го нуль органа |
Функциональная схема алгоритма “Счётчик СЧТ”
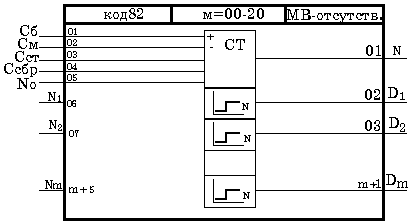
ОДВ - одновибратор
Алгоритм применяется в тех случах, когда необходимо эформировать одиночный импульс заданной длительности. Одновибратор запускается по переднему фронту сначала на входе Сп (пуск), т.е. когда на входе Сп дискретный сигнал переходит из состояния лог.0 в состояние лог.1. Перед пуском выходной дискретный сигнал Dотсутствует. После пуска на выходе D появится сигнал, причём этот сигнал нах. в состоянии лог.1 в течении времени t=Т, где параметр настройки. По истечении времени Т сигнал на выходе внвь переходит в нулевое состояние после чего одновибратор можно вновь пустить.
Входы – выходы алгоритма ОДВ.
| Входы – Выходы | Назначение | ||
| № | Обозначение |
Вид |
|
|
01 02 03 |
Сп Ссбр Т |
Входы |
Команда “пуск” Команда “сброс” Длительность импульса |
|
01 02 |
Д Ти |
Выходы |
Основной импульс Текущее время импульса |
Функциональная схема алгоритма «одновибратор ОДВ»
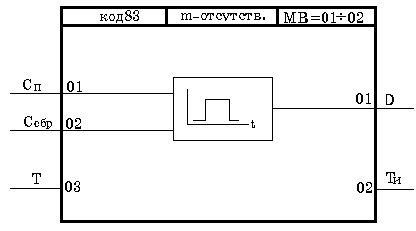 |
МУВ – мультивибратор
Алгоритм применяется для периодического включения оборудования (двигателя, обеспечения мигающей сигнализации и т.п.). Мультивибратор запускается попереднему фронту сигнала на входе Сп (пуск), т.е. при изменении Сп из состояния лог.0 на состояние лог.1 после пуска на основном выходе алгоритма формируется последовательность импульсов. Длительность этих импульсов задаётся настроечным входом Т1, длительность паузы – входом Т0. Состояние основного выхода Д алгоритма в режиме пуска при различных значениях Т1 иТ0 опр – ся таблицей:
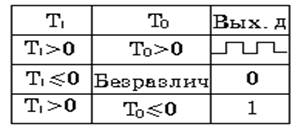
Входы – выходы алгоритма МУВ
Вхроды – выходы |
Назначение | ||
| № | Обозн. | Вид | |
|
01 02 03 04 |
Сп Ссбр Т1 Т0 |
Входы |
К – да “пуск” К – да”сброс” Длительность импульса Длительность паузы |
|
01 02 |
ДТи |
Выходы |
Основной выход Время текущего импульса |
Функциональная схема алгоритма “мультивибратор МУВ”
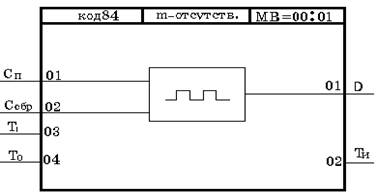 |
ЛОК – логический контроль.
Алгоритм применяется для контроля за состоянием нескольких(до 99) дискретных сигналов. Как правило алгоритм оперативного контроля ОКЛ иОКО. На вход алгоритма подаются m дискретных сигналов, причём 0£m£99 зодаётся модификатором. При m = 0 алгоритм является “пустым”. Если все входные сигналы равны лог. – му 0, вых – ые сигналы N = Д = 0.
Входы - выходы алгоритма ЛОК.
| Входы – выходы | Назначение | ||
| № | Обозн. |
Вид |
|
| 01 | С |
Входы |
Сигнал на 1 – м входе |
|
01 02 |
N Д |
Выходы |
Номер вх – го сигнала (не = 0) Признак отличия от нуля |
Функциональная схема алгоритма ЛОК
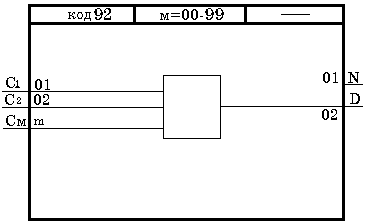 |
УТП – Управление трёхпозиционной нагрузкой
Алгоритм применяется для логического управления трёхпозиционным исполнительным устройством (клапаном с маторным управлением) в тех случаях, когда на исполнительное устройство приходят коды из нескольких (до 16) точек (шагов) лог-й. программы. Алгоритм имеет 3 группы входных сигналов: группа Сотк, j (к.-ды на открытие), группа Сзкр.(к.-да на закрытие) и группа Сост, j (к.-ды на останов.) Каждая группа имеет одинаковое число сигналов 0£м£16. Число м задаётся модификатором.
Входы – выходы алгоритма УТП.
Входы – выходы |
Назначение | ||
| № | Обозн. | Вид. | |
|
01 м+1 2м+1 |
Сотк,1 Сзкр,1 Сост,1 |
Входы |
1-я команда на открытие 1-я команда на закрытие 1-я команда на остановку |
|
01 02 03 04 05 |
Дотк Дзкр Дот Дзк Дос |
Выходы |
Выходная команда на открытие Выходная команда на закрытие Признак команды в группе открытия Признак команды в группе закрытия Признак команды в группе останов.а |
Функциональная схема управления “УТП”
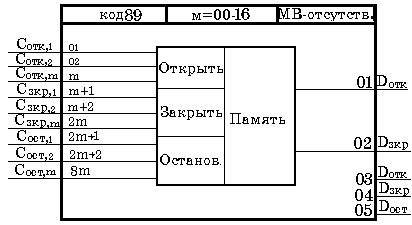
УДП – управление двухпозиционной нагрузкой
Алгоритм применяется для логического управления двухпозиционным исполнительным устройством в тех случаях, когда на одно исполнительное устройство(клапан, нагреватель и т.п.) приходят команды из нескольких точек (шагов) логической программы.
Алгоритм имеет 2 группы входных сигналов: Свкл, j (команды включения) и Свык, j (команды выключения). В каждой группе число сигналов одинаково и равно 0 £м£16. Число м задаётся модификатором.
Входы – выходы алгоритма УДП.
Входы – выходы |
Назначение | ||
| № | Обозначение | Вид | |
|
01 м+1 |
Свкл,1 Свык,1 |
Входы |
1-я команда на включение 1-я команда на выключение |
|
01 02 03 |
Д Двкл Двык |
Выходы |
Основной выход К-да в группе включения К-да в группе выключения |
Функциональная схема алгоритма “УДП”.
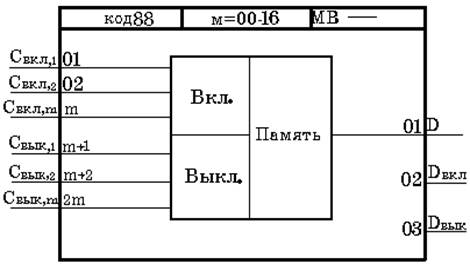
МИЛ – Многовходовое ИЛИ
Алгоритм применяется для логического объединения по ИЛИ нескольких (до 99) дискретных сигналов. Алгоритм имеет м входов Сj и один выход, причём Д £м£99 и задаётся модификатором. При м=0 алгоритм является “пустым”. Выходной сигнал: Д=С1VC2V…VCm. В табличной форме работа алгоритма записывается в виде:
С1 |
С2 | С3 | ….. | См | Д |
| 0 | 0 | 0 | ….. | 0 | 0 |
| 1 | * | * | ….. | * | 1 |
| * | 1 | * | ….. | * | 1 |
| * | * | 1 | ….. | * | 1 |
| M | M | M | ….. | M | M |
| * | * | * | ….. | 1 | 1 |
*-значение сигнала безразлично.
Входы – выходы алгоритма МИЛ.
Входы – выходы |
Назначение | ||
| № | Обозначение | Вид | |
|
01 02 M м |
С1 С2 M См |
Входы |
1-й вход 2-й вход M м-й вход |
| 01 | Д | Выход | Выход |
Функциональная схема алгоритма “МИЛ”.
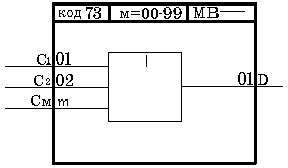 |
ЭТП-Этап.
Алгоритм применяется для организации логической шаговой программы, т.е. программы, которая должна выполнить определённую последовательность действий. Алгоритм ЭТП применяется в сочетании с алгоритмом ОКЛ.
Один этап состоит из 0£м£шагов, причём задаётся модификатором алгоритма ЭТП. Шаг имеет 3 входа и 1 вых. Вход С- условие выполнения шага, вход Т-контрольное время шага, вход N-параметр, определяющий последующий ход выполнения программы, Д-вход шага.
Выходы алгоритма ЭТП.
| № | Обозначение | Назначение |
|
01 02 03 04 05 06 M м+4 |
Nш Tш N Дш Д1 Д2M Дм |
Номер выполняемого шагаВремя оставшееся до истечения контрольного времени выполняемого шага. Параметр, равный параметру Ni выполн – го шага. Признак того, что выполняемый шаг закончен. Выход 1 – го шага Выход 2 – го шага M Выход шага m. |
Функциональная схема алгоритма “Этап ЭТП”
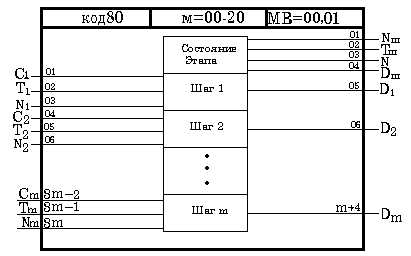
Логическое “И” ЛОИ (70).
Назначение: Алгоритм используется для формирования нескольких (до 20) дискретных сигналов, каждый из которых является логическим объединением по “И” двух дискретных сигналов.
Входы – выходы алгоритмов ЛОИ.
Входы – выходы |
Назначение | ||
| № | Обозн. | Вид | |
|
01 02 03 04 M 2m-1 2m |
С С С С M С1,m C2,m |
Входы |
1 – й вход 1 – го звена 2 – й вход 1 – го звена 1 – й вход 2 – го звена 2 – й вход 2 – го звена 1 – вход m – го звена 2 – й вход m – го звена |
|
01 02 M m |
D1 D2 M Dm |
Выходы |
Выход 1 – го звена Выход 2 – го звена Выход m – го звена |
Функциональная схема алгоритма ЛОИ.
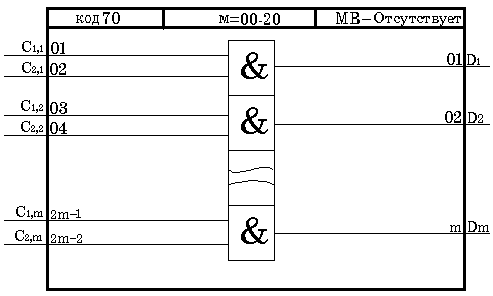
Сумирование с масштабированием СМА (43)
Назначение: Алгоритм используется для получения взвешенной суммы нескольких (до 21) сигналов. В частности, он применяется вместе с алгоритмами регулирование для построения
Регуметоров соотношение либо для введения статической корекции.
Входы – выходы алгоритма СМА.
| Входы – выходы | Назначение | ||
| № | Обозн. | Вид | |
|
01 02 03 M 04 05 M 2m 2m+1 |
X0X1 Kм,1 X2 Kм,2 Xм Kм,m |
Вход |
Немасштабируемый вход (коскадный) 1 – й масштабируемый вход. Масштабируемый коэф. по 1 – му масштабируемому входу. 2 – й масштабируемый вход. Масштабируемый коэф. по 2 – му масштабируемому входу. m – ый масштабируемый вход. Масштабный коэф. по m – му входу |
| 01 | Y | Выход | Вход (каскадный) |
Функциональная схема алгоритма СМА.
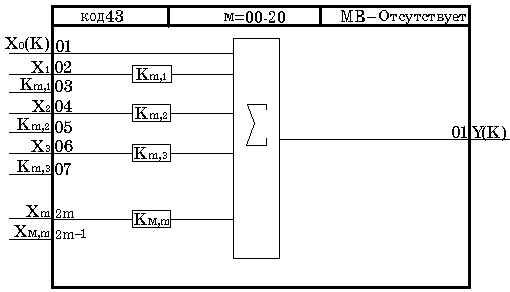
Умножение – деление УМД(44)
Назначение: Алгоритм предназначен для выполнения математических операций умножение и (или) деление.
Входы – выходы алгоритма УМД
Входы – выходы |
Название | ||
| № | Обозн | Вид | |
|
01 02 03 |
Х1 Х2 Х3 |
Входы |
Первый сомножитель Второй сомножитель Дельтель |
| У | Выход | Выход (каскадный) | |
Функциональная схема алгоритма УМД.
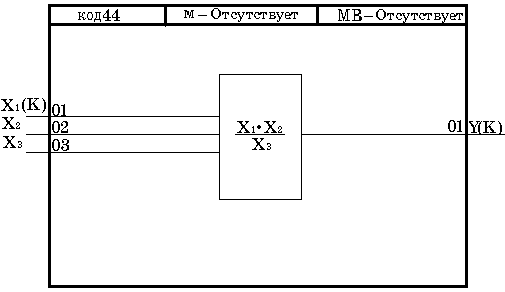 |
Многовходовое “И” МНИ(71).
Назначение: Алгоритм используется для логического объединения по ”И” нескольких (до 99) дискретных сигналов.
Входы – выходы алгоритма МНИ.
| Входы – выходы | Назначение | |||
| № | Обозначение | Вид | ||
|
01 02 M м |
С1 С2 M См |
Входы |
1-й вход 2-й вход M м-й вход |
|
| 01 | Д | Выход | Выход | |
Функциональная схема алгоритма “И”
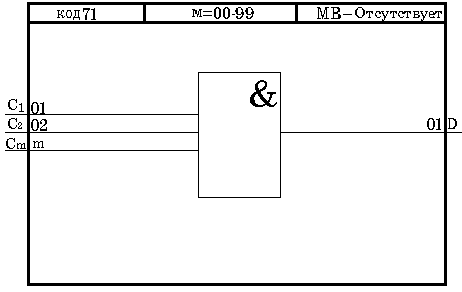 |
Логическое “ИЛИ” (72)
Назначение:Алгоритм используеться для формирования нескольких (до 20) дискретных сигналов, каждый из которых явл. Логическим объед. По “ИЛИ” двух дискретных сигналов.
Входы – выходы алгоритма “ИЛИ”
| № | Обозначение | Вид | Назначение |
|
01 02 03 04 M 2м-1 2м |
С1,1 С2,1 С1,2 С2,2 M С1,м С2,м |
Входы |
1-й вход 1-го звена 2-й вход 2-го звена 1-й вход 2-го звена 2-й вход 2-го звена M 1-й вход м-го звена 2-й вход м-го звена |
|
01 02 M м |
Д1 Д2 Дм |
Выходы |
Выход 1-го звена Выход 2-го звена M Выход м-го звена |
Функциональная схема алгоритма “ИЛИ”
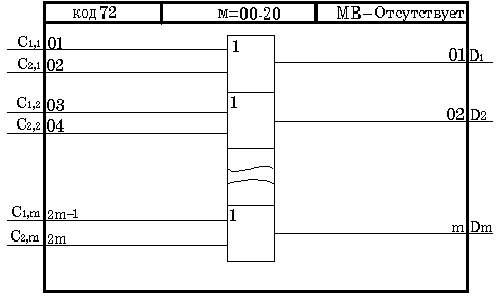 |
Масштабирование МСШ(55).
Назначение: Алгоритм применяеться для масштабирования нескольких (до 20) аналоговых сигналов.
Входы – выходы алгоритма МСШ
Входы – Выходы |
Назначение | ||
| № | Обозначение | Вид | |
|
01 02 03 04 M 2м-1 2м |
Х1 Км,1 Х2 Км,2 ---- Хм Км,м |
Входы |
1-й масштабируемый вход. 1-й масштабируемый коэф. 2-й масштабируемый вход. 2-й масштабируемый коэф. ---- m-й масштабируемый вход m-масштабный коэф. |
|
01 02 M м |
У1 У2 ---- Ум |
Выходы |
1-й выход 2-й выход ---- м-й выход. |
Функциональная схема алгоритма МСШ
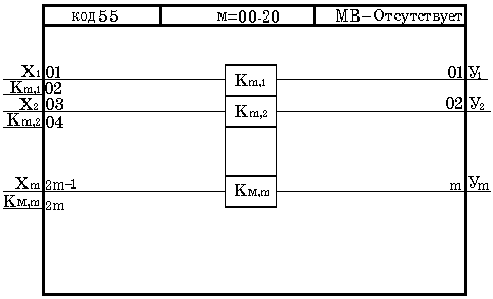
Дискретный контроль ДИК(04)
Назначение: Алгоритм применяеться в сочетании с алгоритмом ОКЛ и используеться для выдачи дискретной информации на лицевую панель контролера. (Только в варианте логического управления).
Входы алгоритма ДИК
| Входы | Назначение | ||
| № | Обозначение | Вид | |
|
01 02 M м |
С С С |
Входы |
1-й ламповый индикатор 2-й ламповый индикотор m-й ламповый индикатор |
 |
Пороговый контроль ПОК (29)
Назначение: Алгоритм контролирует несколько (до 20) аналоговых сигналов, сравнивая каждый из них с двумя индивидуальными для каждого сигнала допустимыми значениями.
Входы-выходы алгоритма ПОК
| Входы-Выходы | Назначение | ||
| № | Обозначение | Вид | |
|
01 04 M 3м-2 02 03 05 06 M 3м-1 3м |
Х1Х2 M Хм ХВ,1 Хн,1 Хв,2 Хн,2 M Хв,м Хн,м |
Входы |
1-й контролируемый сигнал 2-й контролируемый сигнал m-й контролируемый сигнал Верхняя установка 1-го канала Нижняя установка 1-го канала Верхняя установка 2-го канала Нижняя установка 2-го канала Верхняя установка m-го канала Нижняя установка m-го канала. |
|
01 02 |
N D |
Выходы |
Номер Вх сигнала, достигшего установки. Признак того, что один из Вх сигналов. |
Функциональная схема алгоритма ПОК
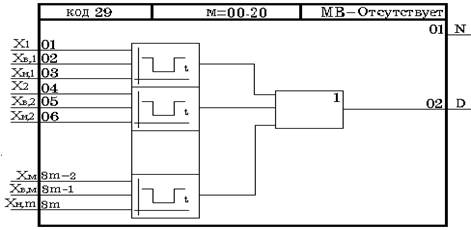 |
Пороговый элемент ПОР (59)
Назначение: Алгоритм применяеться для контроля за выходом сигнала или разности 2-х сигналов из ограниченной справа области допустимых значений.
Входы – выходы алгоритма ПОР.
| Входы-выходы |
Назначение |
||
| № | Обозначение | Вид | |
|
01 02 03 04 M 4m-3 4m-2 4m-1 4m |
Х1,1 Х2,1 Хср,1 Х▲,1 M Х1,m Х2,m Хср,m Х▲,m |
Входы |
Первый вход первой ячейки Второй вход первой ячейки Порог срабатывания первой ячейки Гистерезис первой ячейки Первый вход m-ой ячейки Второй вход m-й ячейки Порог срабатывания m-й ячейки Гистерезис m-ой ячейки |
|
01 02 M m m+1 |
Д1 Д2 M Дm Д0 |
Выходы |
Выход первой ячейки Выход второй ячейки Выход m-ой ячейки Груповой выход |
Функциональная схема алгоритма ПОР