
Рефераты по рекламе
Рефераты по физике
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по хозяйственному праву
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Психология и педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Рефераты по сексологии
Рефераты по информатике программированию
Краткое содержание произведений
Реферат: Определение оптимального плана замены оборудования
Реферат: Определение оптимального плана замены оборудования
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ
УНИВЕРСИТЕТ
Кафедра менеджмента
в отраслях ТЭК
КУРСОВАЯ РАБОТА
по дисциплине: Экономико-математические модели и методы
на тему: Определение оптимального плана замены оборудования
Выполнил: ст. гр. ЭП-99
Архангельская Е.А.
Научный руководитель:
Зольникова С.Н.
Тюмень, 2000
СОДЕРЖАНИЕ
|
Введение. 1. Характеристика состояния хозяйствующего субъекта и выявление тенденций его развития. 2. Информационно-методическое обеспечение экономического моделирования. 2.1 Методическая база решения модели. 2.2 Информационно-методическое обеспечение метода. 3. Расчет показателей экономико-математической модели и экономическая интерпретация результатов. Заключение. Список литературы. Приложения |
3 4 7 7 12 17 29 31 32 |
ВВЕДЕНИЕ
Во всем мире существует множество предприятий, которые используют для производства своей продукции машинное оборудование. Поэтому при его внедрении нужно составлять оптимальный план использования и замены оборудования. Задачи по замене оборудования рассматриваются как многоэтаповый процесс, который характерен для динамического программирования.
Многие предприятия сохраняют или заменяют оборудование по своей интуиции, не применяя методы динамического программирования. Применять эти методы целесообразно, так как это позволяет наиболее четко максимизировать прибыль или минимизировать затраты.
Цель этой курсовой работы изучить динамическое программирование для дальнейшего его использования.
Задача о замене оборудования состоит в определении оптимальных сроков замены старого оборудования. Старение оборудования включает его физический и моральный износ. В результате чего увеличиваются производственные затраты, растут затраты на обслуживание и ремонт, снижается производительность труда и ликвидная стоимость. Критерием оптимальности является либо прибыль от эксплуатации оборудования, либо суммарные затраты на эксплуатацию в течение планируемого периода.
1. ХАРАКТЕРИСТИКА СОСТОЯНИЯ ХОЗЯЙСТВУЮЩЕГО СУБЪЕКТА И ВЫЯВЛЕНИЕ ТЕНДЕНЦИЙ ЕГО РАЗВИТИЯ
Для осуществления своей эффективной деятельности производственные объединения и предприятия должны периодически производить замену используемого ими оборудования. При этой замене учитывается производительность используемого оборудования и затраты, связанные с содержанием и ремонтом оборудования.
К началу планируемого периода на предприятии установлено новое оборудование, позволяющее за каждый год восьмилетнего периода выпустить готовой продукции на сумму соответственно 25,24,24,23,23,23,22,21,20,20,20,20 тыс.д.ед. Ежегодные затраты предприятий, связанные с содержанием и ремонтом используемого аналогичного оборудования за тот же период времени представлены в п.1.табл.1.1. Затраты, связанные с приобретением и установкой нового оборудования, идентично с установленным, составляют 10 д.ед., использованное оборудование списывается.
На основе статистической обработки, результаты которой сведены в таблицу1.2, можно построить графическую зависимость затрат на содержание и ремонт оборудования в планируемом периоде.
Таблица 1.2
Зависимость затрат на содержание и ремонт оборудования в планируемом периоде.
| Порядковые годы эксплуатации оборудования | Затраты, тыс.д.ед. |
| 1 | 2 |
|
0 1 2 |
15,07 15,01 15,94 |
Продолжение табл.1.1
| 1 | 2 |
|
3 4 5 6 7 8 9 10 |
16,11 16,93 16,86 17,96 18 19,11 19,86 20,19 |
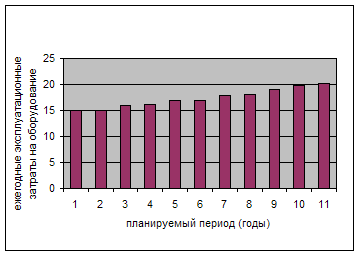
Зависимость затрат на содержание и ремонт оборудования в планируемом периоде.
Рис.1.1
Из графика видно, что затраты на содержание и ремонт оборудования в планируемом периоде с каждым годом растут, потому что оборудование стареет.
Характерным для динамического программирования является подход к решению задачи по этапам, с каждым из которых ассоциирована одна управляемая переменная. Набор рекуррентных вычислительных процедур, связывающих различные этапы, обеспечивает получение допустимого решения задачи в целом при достижении последнего этапа.
Данная задача относится к задачам динамического программирования, потому что выполняются два условия это: аддитивность целевой функции; отсутствие последствия, которое строится на принципе оптимальности Беллмана.
Fn-k(X(k))=max[Wk+1(X(k), uk+1)+Fn-k-1(Xk+1))](k=0, n-1).
Uk+1
2. ИНФОРМАЦИОННО-МЕТОДИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ЭКОНОМИЧЕСКОГО МОДЕЛИРОВАНИЯ
2.1. Методическая база решения модели
В задачах динамического программирования экономический процесс зависит от времени (от нескольких периодов (этапов) времени), поэтому находится ряд оптимальных решений (последовательно для каждого этапа), обеспечивающих оптимальное развитие всего процесса в целом. Задачи динамического программирования называются многоэтапными или многошаговыми. Динамическое программирование представляет собой математический аппарат, позволяющий осуществлять оптимальное планирование многошаговых управляемых процессов и процессов, зависящих от времени. Экономический процесс называется управляемым, если можно влиять на ход его развития. Управлением называется совокупность решений, принимаемых на каждом этапе для влияния на ход процесса. В экономических процессах управление заключается в распределении и перераспределении средств на каждом этапе. Например, выпуск продукции любым предприятием –управляемый процесс, так как он определяется изменением состава оборудования, объемом поставок сырья, величиной финансирования и т.д. Совокупность решений, принимаемых в начале каждого года планируемого периода по обеспечению предприятия сырьем, замене оборудования, размерам финансирования и т.д., является управлением. Казалось бы, для получения максимального объема выпускаемой продукции проще всего вложить максимально возможное количество средств и использовать на полную мощность оборудование. Но это привело бы к быстрому изнашиванию оборудования и, как следствие, к уменьшению выпуска продукции. Следовательно, выпуск продукции надо спланировать так, чтобы избежать нежелательных эффектов. Необходимо предусмотреть мероприятия, обеспечивающие пополнение оборудования по мере изнашивания, т.е. по периодам времени. Последнее хотя и приводит к уменьшению первоначального объема выпускаемой продукции, но обеспечивает в дальнейшем возможность расширения производства. Таким образом, экономический процесс выпуска продукции можно считать состоящим из нескольких этапов (шагов), на каждом из которых осуществляется влияние на его развитие.
Началом этапа (шага) управляемого процесса считается момент принятия решения (о величине капитальных вложений, о замене оборудования определенного вида и т.д.). Под этапом обычно понимают хозяйственный год.
Динамическое программирование, используя поэтапное планирование, позволяет не только упростить решение задачи, но и решить те из них, к которым нельзя применить методы математического анализа. Упрощение решения достигается за счет значительного уменьшения количества исследуемых вариантов, так как вместо того, чтобы один раз решать сложную многовариантную задачу, метод поэтапного планирования предполагает многократное решение относительно простых задач.
Планируя поэтапный процесс, исходят из интересов всего процесса в целом, т.е. при принятии решения на отдельном этапе всегда необходимо иметь в виду конечную цель.
Однако динамическое программирование имеет и свои недостатки. В отличие от линейного программирования, в котором симплексный метод является универсальным, в динамическом программировании такого метода не существует. Каждая задача имеет свои трудности, и в каждом случае необходимо найти наиболее подходящую методику решения. Недостаток динамического программирования заключается также в трудоемкости решения многомерных задач. При очень большом числе переменных решение задачи даже на современных ЭВМ ограничивается памятью и быстродействием машины. Например, если для исследования каждой переменной одномерной задачи требуется 10 шагов, то в двумерной задаче их количество увеличивается до 100, в трехмерной –до 1000 и т.д. [7].
Предположим, какая-то система S находится в некотором начальном состоянии S0 и является управляемой. Таким образом, благодаря осуществлению некоторого управления U указанная система переходит из начального состояния S0 в конечное состояние Sк. При этом качество каждого из реализуемых управлений U характеризуется соответствующим значением функции W(U). Задача состоит в том, чтобы из множества возможных управлений U найти такое U* , при котором функция W(U) принимает экстремальное (максимальное или минимальное) значение W(U*).
Задачи динамического программирования имеют геометрическую интерпретацию. Состояние физической системы S можно описать числовыми параметрами, например расходом горючего и скоростью, количеством вложенных средств и т.д. Назовем эти параметры координатами системы; тогда состояние системы можно изобразить точкой S, а переход из одного состояния S1 в другое S2 –траекторией точки S. Управление U означает выбор определенной траектории перемещения точки S из S1 в S2 , т.е. установление определенного закона движения точки S.
![]()
![]()
![]()
![]() S0 S
Sk
S0 S
Sk

![]()
![]() 0 x
0 x
Область возможных состояний системы
Графическое изображение перехода системы S
Рис.2.1
Совокупность состояний, в которые может переходить система, называется областью возможных состояний. В зависимости от числа параметров, характеризующих состояние системы, область возможных состояний системы
может быть различной. Пусть, например, состояние системы S характеризуется одним параметром, - координатой x . В этом случае изменение координаты, если на нее наложены некоторые ограничения, изобразится перемещением точки S по оси Оx или по ее участку. Следовательно, областью возможных состояний системы является совокупность значений x, а управлением –закон движения точки S из начального состояния S0 в конечное Sk по оси Ox или ее части (рис.2.1).
Если состояние системы S характеризуется двумя параметрами (x1 и x2 ), то областью возможных состояний системы служит плоскость x1Ox2 или ее часть, а управление изобразится линией на плоскости, по которой точка S перемещается из S0 в Sk (рис. 2.2).
![]() х2
х2
 S0
S0
S Sk
![]() 0
х1
0
х1
Управление системы S в графическом изображении
рис.2.2
В общем случае, когда состояние системы описывается n параметрами xi (i=1,2,…,n), областью возможных состояний служит n-мерное пространство, а уравление изображается перемещением точкиS из какой-то начальной области S0 в конечную Sk по некоторой “траектории” этого пространства.
Таким образом, задаче динамического программирования можно дать следующую геометрическую интерпретацию. Из всех траекторий, принадлежащих области возможных состояний системы и соединяющих области S0 и Sk , необходимо выбрать такую, на которой критерий W принимает оптимальное значение. [7].
Чтобы рассмотреть общее решение задач динамического программирования, введем обозначения и сделаем для дальнейших изложений предположения.
Будем считать, что состояние рассматриваемой системы S на K-м шаге (k=1,n) определяется совокупностью чисел X(k) =(x1 (k) , x2(k) ,…, xn(k) ), которые получены в результате реализации управления uk, обеспечившего переход системы S из состояния X(k-1) в состояние X(k). При этом будем предполагать, что состояние X(k) , в которое перешла система S , зависит от данного состояния
X(k-1) и выбранного управления uk и не зависит от того, каким образом система S пришла в состояние X(k-1) .
Далее будем считать, что если в результате реализации k-го шага обеспечен определенный доход или выигрыш, также зависящий от исходного
состояния системы X(k-1) и выбранного управления uk и равный Wk(X(k-1), uk ), то общий доход или выигрыш за n шагов составляет
n
F=∑ Wk(X(k-1), uk ). (2.1)
k=1
Таким образом, задача динамического программирования должна удовлетворять два условия. Первое условие обычно называют условием отсутствия последействия, а второе – условием аддитивности целевой функции задачи.
2.2 Информационно-методическое обеспечение метода
Выполнение для задачи динамического программирования первого условия позволяет сформулировать для нее принцип оптимальности Беллмана. Прежде чем сделать это, надо дать определение оптимальной стратегии управления. Под такой стратегией понимается совокупность управлений U*=(u1*, u2*, …, un*), в результате реализации которых система S за n шагов переходит из начального состояния X(0) в конечное X(k) и при этом функция (2.1) принимает наибольшее значение.
Принцип оптимальности: какое бы не было состояние системы перед очередным шагом, надо выбрать управление на этом шаге так, чтобы выигрыш на данном шаге плюс оптимальный выигрыш на всех последующих шагах был максимальным.
Отсюда следует, что оптимальную стратегию управления можно получить, если сначала найти оптимальную стратегию управления на n-м шаге, затем на двух последних шагах, затем на трех последних шагах и т.д., вплоть до первого шага. Таким образом, решение рассматриваемой задачи динамического программирования целесообразно начинать с определения оптимального решения на последнем, n-м шаге. Для того чтобы найти это решение, очевидно, нужно сделать различные предположения о том, как мог окончиться предпоследний шаг, и с учетом этого выбрать управление un0 , обеспечивающее максимальное значение функции Wn(X(n-1), un ). Такое управление un0 выбранное при определенных предположениях о том, как окончился предыдущий шаг, называется условно оптимальным управлением. Следовательно, принцип оптимальности требует находить на каждом шаге условно оптимальное управление для любого из возможных исходов предшествующего шага.
Чтобы это можно было осуществить практически, необходимо дать математическую формулировку принципа оптимальности. Для этого введем некоторые дополнительные обозначения. Обозначим через Fn(X0) максимальный доход, получаемый за n шагов при переходе системы S из начального состояния X(0) в конечное состояние X(k) при реализации оптимальной стратегии управления U=(u1, u2, …, un), а через Fn-k(X(k)) –максимальный доход, получаемый при переходе из любого состояния X(k) в конечное состояние X(n) при оптимальной стратегии управления на оставшихся n-k шагах. Тогда:
Fn(X0)=max[W1(X(0), u1)+…+ Wn(X(n-1), un)]; (2.2)
Uk+j
Fn-k(X(k))=max[Wk+1(X(k), uk+1)+Fn-k-1(Xk+1))](k=0, n-1). (2.3)
Uk+1
Последнее выражение представляет собой математическую запись принципа оптимальности и носит название основного функционального уравнения Беллмана или рекуррентного соотношения. Используя данное уравнение можно найти решение задачи динамического программирования.
Полагая k=n-1 в рекуррентном соотношении (2.3) , получим следующее функциональное уравнение:
F1(X(n-1)=max[Wn(X(n-1), un)+F0(X(n))]. (2.4)
un
В этом уравнении F0(X(n)) будем считать известным. Используя теперь уравнение (1.4) и рассматривая всевозможные допустимые состояния системы S на (n-1)-м шаге X1(n-1), X2(n-1), …, Xm(n-1), …, находим условные оптимальные решения
un0(x1(n-1)), un0(x2(n-1)),…, un0(xm(n-1)),…
и соответствующие значения функции (2.4)
F10 (X1(n-1)), F10 (X2(n-1)), …, F10 (Xm(n-1)),… .
Таким образом, на n-м шаге находим условно оптимальное управление при любом допустимом состоянии системы S после (n-1)-го шага. То есть, в каком бы состоянии система ни оказалась после (n-1)-го шага, будет известно, какое следует принять решение на n-м шаге. Известно также и соответствующее значение функции (2.4). Рассмотрим функциональное уравнение при k=n-2:
F2(X(n-1))=max[Wn-1(X(n-2), un-1)+F1(X(n-1))]. (2.5)
Un-1
Для того чтобы найти значения F2 для всех допустимых значений X(n-2), необходимо знать Wn-1(X(n-2), un-1) и F1(X(n-1)). Что касается значений F1(X(n-1)), то они уже определены.Поэтому нужно произвести вычисления для Wn-1(X(n-2), un-1) при некотором отборе допустимых значений X(n-2) и соответствующих управлений un-1 . Эти вычисления позволят определить условно оптимальное управление u0n-1 для каждого X(n-2) . Каждое из таких управлений совместно с уже выбранным управлением на последнем шаге обеспечивает максимальное значение дохода на двух последних шагах.
Последовательно осуществляя описанный выше итерационный процесс, дойдем до первого шага. На этом шаге известно, в каком состоянии может находиться система. Поэтому уже не требуется делать предположений о допустимых состояниях системы, а остается лишь только выбрать управление, которое является наилучшим с учетом условно оптимальных управлений, уже принятых на всех последующих шагах.
Таким образом, в результате последовательного прохождения всех этапов от конца к началу определяется максимальное значение выигрыша за n шагов и для каждого из них находим условно оптимальное управление.
Чтобы найти оптимальную стратегию управления, то есть определить искомое решение задачи, нужно теперь пройти всю последовательность шагов, только на этот раз от начала к концу. А именно: на первом шаге в качестве оптимального управления u1* возьмем найденное условно оптимальное управление u10. На втором шаге найдем состояние X1* , в которое переводит систему управление u1*. Это состояние определяет найденное условно оптимальное u20 , которое теперь считается оптимальным. Зная u2*, находим X2*, а значит, определяем u3* и т.д. В результате этого найдется решение задачи, то есть максимально возможный доход и оптимальную стратегию управления U*, включающую оптимальные управления на отдельных шагах: U*= (u1*, u2*, …, un*).
Итак, из нахождения решения задачи динамического программирования видно, что этот процесс является довольно громоздким. Поэтому более сложные задачи решают с помощью ЭВМ. [1].
Динамическую задачу по замене оборудования возможно также решить и графическим методом. На оси Х откладывают номер шага (к). на оси У – возраст оборудования (t). Точка (к-1;t) на плоскости соответствует началу К-ого шага по эксплуатации оборудования в возрасте t лет.
![]() Любая траектория переводящая
точку S(k-1;t)
из состояния S0 S, . Состоит из отрезков,
то есть из шагов соответствующих годам эксплуатации. Нужно выбрать такую
траекторию при которой затраты на эксплуатацию будут минимальны. Если известны
зависимость производительности установленного на предприятии оборудования от
времени его использования R(t)
и зависимость затрат на ремонт оборудования при различном времени его
использования S(t) и затраты
связанные с приобретением нового оборудования, то показателем эффективности в
этом случае является прибыль которая максимизируется.
Любая траектория переводящая
точку S(k-1;t)
из состояния S0 S, . Состоит из отрезков,
то есть из шагов соответствующих годам эксплуатации. Нужно выбрать такую
траекторию при которой затраты на эксплуатацию будут минимальны. Если известны
зависимость производительности установленного на предприятии оборудования от
времени его использования R(t)
и зависимость затрат на ремонт оборудования при различном времени его
использования S(t) и затраты
связанные с приобретением нового оборудования, то показателем эффективности в
этом случае является прибыль которая максимизируется.
3. РАСЧЕТ ПОКАЗАТЕЛЕЙ ЭКОНОМИКО-МАТЕМАТИЧЕСКОЙ МОДЕЛИ И ЭКОНОМИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ РЕЗУЛЬТАТОВ
В этой задаче в качестве системы S выступает оборудование. Состояние этой системы определяются фактическим временем использования оборудования (его возрастом) t, то есть описываются единственным параметром t.
В качестве управлений выступают решения о замене и сохранении оборудования, принимаемые в начале каждого года. Обозначим через Xc решение о сохранении оборудования, а через Xз –решение о замене оборудования. Тогда задача состоит в нахождении такой стратегии управления, определяемой решениями, принимаемыми к началу каждого года, при которой общая прибыль предприятия за восемь лет является максимальной.
Эта задача обладает свойствами аддитивности и отсутствия последействия. Следовательно, ее решение можно найти с помощью алгоритма, реализуемого в два этапа. На первом этапе при движении от начала 10-го года периода к началу 1-го года для каждого допустимого состояния оборудования найдем условное оптимальное управление (решение), а на втором этапе при движении от начала 1-го года периода к началу 10-года из условных оптимальных решений для каждого года составим оптимальный план замены оборудования на десять лет.
Для определения условных оптимальных решений сначала необходимо составить функциональное уравнение Беллмана. Так как было предположено, что к началу k-го года (k=1,2,3,4,5,6,7,8,9,10) может приниматься только одно из двух решений – заменять или не заменять оборудование, то прибыль предприятия за k-ый год составит:
![]() Z*k
= max r(t)-s(t)+Zk+1(t+1) ; Xc
Z*k
= max r(t)-s(t)+Zk+1(t+1) ; Xc
r(0)-s(0)-P0+Zk+1(1) ; Xз (3.1)
где t –возраст оборудования к началу k-го года (k=1,2,3,4,5,6,7,8,9,10); Xk –управление, реализуемое к началу k-го года; P0 –стоимость нового оборудования.
Используя теперь уравнение (3.1) , находим решение исходной задачи. Это решение начинается с определения условно оптимального управления (решения) для последнего (10-го) года периода, в связи с чем находим множество допустимых состояний оборудования к началу данного года. Так как к началу периода имеется новое оборудование (t =0), то возраст оборудования к началу 10-го года может составлять 1,2,3,4,5,6,7,8,9 лет. Для каждого из этих состояний найдем условно оптимальное решение и соответствующее значение функции Z*10(t).
 Z*10(1)=max
8,99 = 8,99; Xc
Z*10(1)=max
8,99 = 8,99; Xc
-0,07
 Z*10(2)=max
8,06 = 8,06; Xc
Z*10(2)=max
8,06 = 8,06; Xc
-0,07
 Z*10(3)=max
6,89 = 6,89; Xc
Z*10(3)=max
6,89 = 6,89; Xc
-0,07
 Z*10(4)=max
6,07 = 6,07; Xc
Z*10(4)=max
6,07 = 6,07; Xc
-0,07
 Z*10(5)=max
6,14 = 6,14; Xc
Z*10(5)=max
6,14 = 6,14; Xc
-0,07
 Z*10(6)=max
4,04 = 4,04; Xc
Z*10(6)=max
4,04 = 4,04; Xc
-0,07
 Z*10(7)=max
3,00 = 3,00; Xc
Z*10(7)=max
3,00 = 3,00; Xc
-0,07
 Z*10(8)=max
0,89 = 0,89; Xc
Z*10(8)=max
0,89 = 0,89; Xc
-0,07
 Z*10(9)=max 0,14 = 0,14; Xc
Z*10(9)=max 0,14 = 0,14; Xc
-0,07
Полученные результаты сведены в таблицу 3.1
Таблица 3.1
Возможное состояние оборудование к началу 10-го года периода
|
Возраст оборудования t (лет) |
Значения функции Z*10(t) (тыс.д.ед.) |
Условно оптимальное решение Х |
| 1 | 8,99 |
Xc |
| 2 | 8,06 |
Xc |
| 3 | 6,89 |
Xc |
| 4 | 6,07 |
Xc |
| 5 | 6,14 |
Xc |
| 6 | 4,04 |
Xс |
| 7 | 3 |
Xс |
| 8 | 0,89 |
Xс |
| 9 | 0,14 |
Xс |
Рассмотрим возможное состояние оборудование к началу 9-го года периода и найдем соответствующие значения функции Z*9(t).
 Z*9(1)=max 17,05 = 17,05; Xc
Z*9(1)=max 17,05 = 17,05; Xc
8,92
 Z*9(2)=max
14,95 = 14,95; Xc
Z*9(2)=max
14,95 = 14,95; Xc
8,92
 Z*9(3)=max 12,96 = 12,96; Xc
Z*9(3)=max 12,96 = 12,96; Xc
8,92
 Z*9(4)=max
12,21 = 12,21; Xc
Z*9(4)=max
12,21 = 12,21; Xc
8,92
 Z*9(5)=max
10,18 = 10,18; Xc
Z*9(5)=max
10,18 = 10,18; Xc
8,92
 Z*9(6)=max
7,04 = 8,92; Xc
Z*9(6)=max
7,04 = 8,92; Xc
8,92
 Z*9(7)=max
3,89 = 8,92; Xc
Z*9(7)=max
3,89 = 8,92; Xc
8,92
 Z*9(8)=max
4,04 = 8,92; Xc
Z*9(8)=max
4,04 = 8,92; Xc
8,92
Полученные результаты записаны в таблице 3.2
Таблица 3.2
возможное состояние оборудование к началу 9-го года периода
|
Возраст оборудования t (лет) |
Значения функции Z*9(t) (тыс.д.ед.) |
Условно оптимальное решение Х |
| 1 | 17,05 |
Xc |
| 2 | 14,95 |
Xc |
| 3 | 12,96 |
Xс |
| 4 | 12,21 |
Xс |
| 5 | 10,18 |
Xс |
| 6 | 8,92 |
Xз |
| 7 | 8,92 |
Xз |
| 8 | 8,92 |
Xз |
Определим условно оптимальное решение для каждого из допустимых состояний оборудования к началу 8-го года периода.
В соответствии с уравнением 3.1 имеем:
 Z*8(1)=max
23,94 = 23,94 ; Xc
Z*8(1)=max
23,94 = 23,94 ; Xc
 16,98
16,98
Z*8(2)=max 21,02 = 21,02 ; Xc
16,98
 Z*8(3)=max 19,10 =
19,10 ; Xc
Z*8(3)=max 19,10 =
19,10 ; Xc
16,98
 Z*8(4)=max 16,25 =
16,98 ; Xз
Z*8(4)=max 16,25 =
16,98 ; Xз
16,98
 Z*8 (5)=max 15,06
= 16,98 ; Xз
Z*8 (5)=max 15,06
= 16,98 ; Xз
16,98

Z*8(6) =max 12,96 = 16,98 ; Xз
 16,98
16,98
Z*8(7)=max 16,98 = 16,98 ; Xз,Xс
16,98
Полученные результаты сведены в таблицу 3.3
Таблица 3.3
Возможное состояние оборудование к началу 8-го года периода
|
Возраст оборудования t (лет) |
Значения функции Z*8(t) (тыс.д.ед.) |
Условно оптимальное решение Х |
| 1 | 23,94 |
Xc |
| 2 | 21,02 |
Xc |
| 3 | 19,10 |
Xc |
| 4 | 16,98 |
Xз |
| 5 | 16,98 |
Xз |
| 6 | 16,98 |
Xз |
| 7 | 16,98 |
Xc,Xз |
Рассмотрим возможное состояние оборудование к началу 7-го года периода и найдем соответствующие значения функции Z*7(t).
 Z*7(1)=max 8,99 +21,02 = 30,01 ; Xc
Z*7(1)=max 8,99 +21,02 = 30,01 ; Xc
 9,93-10+23,94
9,93-10+23,94
Z*7(2)=max 8,06+19,10 = 27,16 ; Xc
 23,87
23,87
Z*7(3)=max 6,89+16,98 = 23,87 ; Xз ,Xс
23,87
 Z*7(4)=max
6,07+16,98 = 23,87 ; Xз
Z*7(4)=max
6,07+16,98 = 23,87 ; Xз
23,87
 Z*7(5)=max
6,14+16,98 = 23,87 ; Xз
Z*7(5)=max
6,14+16,98 = 23,87 ; Xз
23,87
Z*7(6)=max 4,04+16,98 = 23,87 ; Xз
23,87
Полученные результаты записаны в таблице 3.4
Таблица 3.4
возможное состояние оборудование к началу 7-го года периода
|
Возраст оборудования t (лет) |
Значения функции Z*7(t) (тыс.д.ед.) |
Условно оптимальное решение Х |
| 1 | 30,01 |
Xc |
| 2 | 27,16 |
Xc |
| 3 | 23,87 |
Xз,Xс |
| 4 | 23,87 |
Xз |
| 5 | 23,87 |
Xз |
| 6 | 23,87 |
Xз |
Определим условно оптимальное решение для каждого из допустимых состояний оборудования к началу 6-го года периода.
В соответствии с уравнением 3.1 имеем:
Z*6(1)=max 8,99+ 27,16 = 36,15 ; Xc
29,94
Z*6(2)=max 8,06+23,87 = 31,93 ; Xc
29,94
Z*6(3)=max 6,89+23,87 = 30,76 ; Xс
29,94
 Z*6(4)=max 6,07+23,87 = 29,94 ; Xз , Xс
Z*6(4)=max 6,07+23,87 = 29,94 ; Xз , Xс
29,94
Z*6(5)=max 6,14+23,87 = 30,01 ; Xс
29,94
Из значения функции Z*6(4) видно, что если к началу 6-го года периода возраст оборудования составляет 4 года, то независимо от того, будет ли принято решение Xc или Xз, величина прибыли окажется одной и той же. Это означает, что в качестве условно оптимального решения можно взять любое. Полученные значения для Z*6(t) записаны в таблице 3.5
Таблица 3.5
возможное состояние оборудование к началу 6-го года периода
|
Возраст оборудования t (лет) |
Значения функции Z*6(t) (тыс.д.ед.) |
Условно оптимальное решение Х |
| 1 | 36,15 |
Xc |
| 2 | 31,93 |
Xc |
| 3 | 30,76 |
Xс |
| 4 | 29,94 |
Xс,Xз |
| 5 | 30,01 |
Xс |
Рассмотрим возможное состояние оборудования к началу 5-го года и найдем для каждого из них условно оптимальное решение и соответствующее значение функции Z*5(t).
 Z*5(1)=max
8,99+31,93 = 40,92 ; Xc
Z*5(1)=max
8,99+31,93 = 40,92 ; Xc
36,08
 Z*5(2)=max
8,06+30,76 = 38,82 ; Xc
Z*5(2)=max
8,06+30,76 = 38,82 ; Xc
36,08
 Z*5(3)=max
6,89+29,94 = 36,83 ; Xс
Z*5(3)=max
6,89+29,94 = 36,83 ; Xс
36,08
 Z*5(4)=max
6,07+30,01 = 36,08 ; Xз ,Xс
Z*5(4)=max
6,07+30,01 = 36,08 ; Xз ,Xс
36,08
Полученные результаты записаны в таблице 3.6.
Таблица 3.6
возможное состояние оборудование к началу 5-го года периода
|
Возраст оборудования t (лет) |
Значения функции Z*5(t) (тыс.д.ед.) |
Условно оптимальное решение Х |
| 1 | 40,92 |
Xc |
| 2 | 38,82 |
Xc |
| 3 | 36,83 |
Xс |
| 4 | 36,08 |
Xс,Xз |
Определим условно оптимальное решение для каждого из допустимых состояний оборудования к началу 4-го года периода. В соответствии с уравнением (3.1):
 Z*4(1)=max 8,99+38,82 = 47,81 ; Xc
Z*4(1)=max 8,99+38,82 = 47,81 ; Xc
40,85
 Z*4(2)=max 8,06+ 36,83 = 44,89 ; Xc
Z*4(2)=max 8,06+ 36,83 = 44,89 ; Xc
40,85
 Z*4(3)=max 6,89+36,08 = 42,97 ; Xс
Z*4(3)=max 6,89+36,08 = 42,97 ; Xс
40,85
Полученные результаты записаны в таблице 3.7.
Таблица 3.7
возможное состояние оборудование к началу 4-го года периода
|
Возраст оборудования t (лет) |
Значения функции Z*4(t) (тыс.д.ед.) |
Условно оптимальное решение Х |
| 1 | 47,81 |
Xc |
| 2 | 44,89 |
Xc |
| 3 | 42,97 |
Xс |
Рассмотрим возможное состояние оборудования к началу 3-го года и найдем для каждого из них условно оптимальное решение и соответствующее значение функции Z*3(t).
Z*3(1)=max 8,99+44,89 = 53,88 ; Xc
47,74
 Z*3(2)=max 8,06+42,97 = 51,03 ; Xc
Z*3(2)=max 8,06+42,97 = 51,03 ; Xc
47,74
Полученные результаты записаны в таблице 3.8.
Таблица 3.8
Возможное состояние оборудование к началу 3-го года периода
|
Возраст оборудования t (лет) |
Значения функции Z*3(t) (тыс.д.ед.) |
Условно оптимальное решение Х |
| 1 | 53,88 |
Xc |
| 2 | 51,03 |
Xc |
Теперь рассматриваются допустимые состояния оборудования к началу 2-го года периода. На данный момент времени возраст оборудования может быть равен только лишь одному году. Поэтому предстоит сравнить лишь два возможных решения: сохранить оборудование или произвести замену.
 Z*2(1)=max 8,99+51,03 = 60,02 ;
Xc
Z*2(1)=max 8,99+51,03 = 60,02 ;
Xc
53,81
К началу второго года периода оборудование требуется сохранить.
Согласно условию к началу периода установлено новое оборудование (t=0). Поэтому проблема выбора между сохранением и заменой оборудования не существует: оборудование следует сохранить. Значит, условно оптимальным решением является Xc, а значение функции: Z*1(1)=9,93+60,02 =69,95.
Таким образом, максимальная прибыль предприятия может быть равной 69,95 тыс.д.ед. Она соответствует оптимальным планам замены оборудования, т.к. оптимальный план не единственный. Оптимальные планы получаются на основе данных таблиц 3.1, 3.2, 3.3, 3.4, 3.5, 3.6, 3.7, 3.8, то есть в результате вычислительного процесса, состоящего в прохождении всех рассмотренных шагов с начала 1-го до начала 10-го года периода. Для 1-го года периода решение единственно – следует сохранить оборудование. Значит возраст оборудования к началу 2-го года периода равен одному году. Тогда оптимальным решением для 2-го года периода является решение о сохранении оборудования. Реализация такого решения приводит к тому, что возраст оборудования к началу 3-го года периода становится равным двум годам. При таком возрасте (см. табл.3.8) оборудование в 3-м году периода следует сохранить. После сохранения оборудования его возраст к началу 4-го года периода составит три года. Как видно из таблицы 3.7 , при таком возрасте оборудование следует сохранить. Поэтому возраст оборудования к началу 5-го года периода составит четыре года. Из таблицы 3.6 следует, что оборудование следует сохранить или заменить и в случае сохранения его возраст к началу 6-го периода составит пять лет, и оборудование вновь следует сохранить (см. таблицу 3.5). Если мы оборудование сохраняем к началу 7-го года периода, то возраст оборудования будет шесть лет, а из таблицы 3.4 следует, что оборудование следует заменить. К началу 8-го года периода возраст оборудования составит один год, а это значит, оборудование следует сохранить (см. таблицу 3.3). К началу 9-го года периода возраст оборудования составит два года и в соответствие с таблицей 3.2 оно опять сохраняется. К началу 10-го года периода оборудование сохраняется (см. таблицу 3.1).
Рассмотрим следующий оптимальный план:
Для этого вернемся к началу 5-го года периода, когда возраст оборудования будет равным четырём годам. При таком возрасте (см. табл.3.6) оборудование в 5-м году периода следует сохранить или заменить. В отличие от предыдущего оптимального плана, заменим оборудование. После замены оборудования его возраст к началу 6-го года периода составит один год. Как видно из таблицы 3.5, при таком возрасте оборудование следует сохранить. Поэтому возраст оборудования к началу 7-го года периода составит два года. Из таблицы 3.4 следует, что оборудование следует сохранить и его возраст составит три года, значит, к началу 8-го года оборудование следует сохранить (см. таблицу 3.3). Если мы оборудование сохраняем к началу 9-го года периода, то возраст оборудования будет четыре года, а из таблицы 3.2 следует, что оборудование следует сохранить. К началу 10-го года периода возраст оборудования составит пять лет, а это значит, оборудование следует сохранить (см. таблицу 3.1).
Таблица 3.9
Оптимальные планы замены оборудования
| Возраст оборудования t | Оптимальные планы | |
I |
II |
|
| 1 | Сохранить | |
| 2 | Сохранить | |
| 3 | Сохранить | |
| 4 | Сохранить | |
| 5 | Сохранить | Заменить |
| 6 | Сохранить | |
| 7 | Заменить | Сохранить |
| 8 | Сохранить | |
| 9 | Сохранить | |
| 10 | Сохранить | |
Запишем в таблицу 3.9 данные нашей задачи, и на основании этой таблицы построим график зависимости производительности оборудования от времени его использования предприятием.
Таблица 3.10
Данные задачи замены оборудования
| Годы эксплуатации | Затраты S(t) | Годовая продукция r(t) | r(t)-S(t) | |||
| 0 | 15,07 | 25 | 9,93 | |||
| 1 | 15,01 | 24 | 8,99 | |||
| 2 | 15,94 | 24 | 8,06 | |||
| 3 | 16,11 | 23 | 6,89 | |||
| 4 | 16,93 | 23 | 6,07 | |||
| 5 | 16,86 | 23 | 6,14 | |||
| 6 | 17,96 | 22 | 4,04 | |||
| 7 | 18 | 21 | 3 | |||
| 8 | 19,11 | 20 | 0,89 | |||
| 9 | 19,86 | 20 | 0,14 | |||
|
10 |
20,18 | 20 | -0,18 |
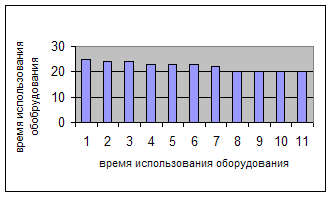
Зависимость производительности оборудования от времени его использования предприятием
Рис.3.1
Из графика видно, что производительность оборудования со временем падает, то есть оборудование стареет и требует ремонта или замены.
В таблице 3.10 сведены значения оптимальных планов замены оборудования.
Таблица 3.10
Значения оптимальных планов замены оборудования
|
I |
II |
| 69,95 | 69,95 |
| 60,02 | 60,02 |
| 51,03 | 51,03 |
| 42,97 | 42,97 |
| 36,08 | 36,08 |
| 30,01 | 36,15 |
| 23,87 | 27,16 |
| 23,94 | 19,10 |
| 14,95 | 12,21 |
| 6,89 | 6,14 |
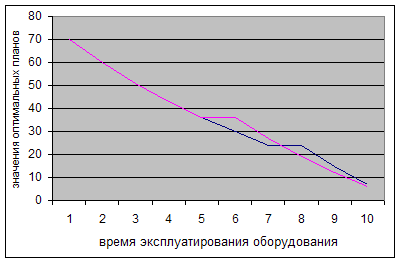
Зависимость получаемой прибыли предприятием от времени использования эксплуатируемого оборудования при оптимальных планах его замены
Рис.3.2
На рисунке 3.2 изображено два оптимальных плана. Из рисунка видно, что к началу 5-го года значения всех оптимальных планов одинаковы.
ЗАКЛЮЧЕНИЕ
Динамическое программирование – это область математического программирования, включающая совокупность приемов и средств для нахождения оптимального решения, а также оптимизации каждого шага в системе и выработке стратегии управления, то есть процесс управления можно представить как многошаговый процесс. Динамическое программирование, используя поэтапное планирование, позволяет не только упростить решение задачи, но и решить те из них, к которым нельзя применить методы математического анализа. Упрощение решения достигается за счет значительного уменьшения количества исследуемых вариантов, так как вместо того, чтобы один раз решать сложную многовариантную задачу, метод поэтапного планирования предполагает многократное решение относительно простых задач. Планируя поэтапный процесс, исходят из интересов всего процесса в целом, т.е. при принятии решения на отдельном этапе всегда необходимо иметь в виду конечную цель.
Однако динамическое программирование имеет и свои недостатки. В отличие от линейного программирования, в котором симплексный метод является универсальным, в динамическом программировании такого метода не существует. Каждая задача имеет свои трудности, и в каждом случае необходимо найти наиболее подходящую методику решения. Недостаток динамического программирования заключается также в трудоемкости решения многомерных задач. Задача динамического программирования должна удовлетворять два условия. Первое условие обычно называют условием отсутствия последействия, а второе –условием аддитивности целевой функции задачи.
На практике встречаются такие задачи планирования, в которых заметную роль играют случайные факторы, влияющие как на состояние системы, так и на выигрыш. Существует разница между детерминированной и стохастической задачами динамического программирования. В детерминированной задаче оптимальное управление является единственным и указывается заранее как жесткая программа действий. В стохастической задаче оптимальное управление является случайным и выбирается в ходе самого процесса в зависимости от случайно сложившейся ситуации. В детерминированной схеме, проходя процесс по этапам от конца к началу, тоже находится на каждом этапе целый ряд условных оптимальных управлений, но из всех этих управлений, в конечном счете осуществлялось только одно. В стохастической схеме это не так. Каждое из условных оптимальных управлений может оказаться фактически осуществленным, если предшествующий ход случайного процесса приведет систему в соответствующее состояние.
Принцип оптимальности является основой поэтапного решения задач динамического программирования. Типичными представителями экономических задач динамического программирования являются так называемые задачи производства и хранения, задачи распределения капиталовложений, задачи календарного производственного планирования и другие. Задачи динамического программирования применяются в планировании деятельности предприятия с учетом изменения потребности в продукции во времени. В оптимальном распределении ресурсов между предприятиями в направлении или во времени.
Описание характеристик динамического программирования и типов задач, которые могут быть сформулированы в его рамках, по необходимости должно быть очень общим и несколько неопределенным, так как существует необозримое множество различных задач, укладывающихся в схему динамического программирования. Только изучение большого числа примеров дает отчетливое понимание структуры динамического программирования.
СПИСОК ЛИТЕРАТУРЫ
1.Акулич И.Л. Математическое программирование в примерах и задачах.- М.: Высшая школа, 1993.
2.Вентцель Е.С. Элементы динамического программирования.- М.: Наука, 1964.
3. Дудорин В.И. Моделирование в задачах управления производством.-М.: Статистика, 1980.
4. Исследования операций в экономике: учебное пособие для ВУЗов / под ред. Кремера Н.Ш. –М.: Банки и Биржи , ЮНИТИ, 1997.
5. Карасев А.И., Кремер Н.Ш., Савельева Т.И. Математические методы и модели в планировании.-М.: Экономика, 1987.
6. Карманов В.Г. Математическое программирование. –М.: Наука, 1986.
7.Колемаев В.А. Математическая экономика.- М.: Юнити,1998.
8. Лотов А.В. введение в экономико-математическое моделирование.-М.: Наука, 1984.
9. Ромакин М.И. Оптимизация планирования производства: экономико-математические модели и методы.-М.: Финансы и статистика, 1981.
10. Таха Х.А. Введение в исследование операций. Кн.1 и2.-М.:Мир, 1985.
11. Терехов Л.Л. Экономико-математические методы.- М.: Статистика, 1972.
12. Фатхутдинов Р.А. Разработка управленческого решения. Учебное пособие.-М.:Интер-Синтез, 1997.
13. Фатхутдинов Р.А. Система менеджмента.-М.: Интер-Синтез, 1996.
14. Хедли Дж. Нелинейное и динамическое программирование.- М.: Мир, 1967.
ПРИЛОЖЕНИЯ
Приложение 1
Таблица 1.1
Затраты на содержание и ремонт аналогичного оборудования других предприятий
| Порядковые годы эксплу-атации оборудования | Показатели | |||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 0 | Затраты, тыс. д.ед. | 14,7-14,9 | 14,9-15,1 | 15,1-15,3 | 15,3-15,5 | 15,5 и более |
| Коли-чество пред-приятий | 4 | 5 | 2 | 2 | 1 | |
| 1 | Затраты, тыс. д.ед. | 14,6-14,8 | 14,8-15,0 | 15,0-15,2 | 15,2-15,4 | 15,4 и более |
| Коли-чество пред-приятий | 3 | 4 | 4 | 2 | 1 | |
| 2 | Затраты, тыс. д.ед. | 15,4-15,6 | 15,6-15,8 | 15,8-16,0 | 16,0-16,2 | 16,2 и более |
| Коли-чество пред-приятий | 2 | 3 | 2 | 4 | 3 | |
| 3 | Затраты, тыс. д.ед. | До 15 | 15,5-16,0 | 16,0-16,5 | 16,5-17,0 | 17,0 и более |
| Коли-чество пред-приятий | 3 | 4 | 3 | 2 | 2 | |
| 4 | Затраты, тыс. д.ед. | 16,5-16,7 | 16,7-16,9 | 16,9-17,1 | 17,1 и более | |
| Коли-чество пред-приятий | 3 | 3 | 4 | 4 | ||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 5 | Затраты, тыс. д.ед. | До 16,0 | 16,0-16,5 | 16,5-17,0 | 17,-17,5 | 17,5 и более |
| Коли-чество пред-приятий | 2 | 2 | 4 | 3 | 3 | |
| 6 | Затраты, тыс. д.ед. | 17,5-17,7 | 17,7-17,9 | 17,9-18,1 | 18,1-18,3 | 18,3 и более |
| Коли-чество пред-приятий | 3 | 3 | 4 | 2 | 2 | |
| 7 | Затраты, тыс. д.ед. | До17,8 | 17,8-18,0 | 18,0-18,2 | 18,2 и более | |
| Коли-чество пред-приятий | 3 | 4 | 4 | 3 | ||
| 8 | Затраты, тыс. д.ед. | 18,0-18,5 | 18,5-19,0 | 19,0-19,5 | 19,5-20,0 | 20,0 и более |
| Коли-чество пред-приятий | 3 | 4 | 3 | 2 | 2 | |